
 E-mail Alert
E-mail Alert RSS
RSS
| Citation: |
Li Xiaofen, Huo Yongqing. Generating HDR radiance maps from single LDR image[J]. Opto-Electronic Engineering, 2017, 44(6): 577-586. doi: 10.3969/j.issn.1003-501X.2017.06.002

|
Generating HDR radiance maps from single LDR image
-
Abstract
We present a method of generating high dynamic range (HDR) radiance maps from a single low dynamic range (LDR) image and its camera response function (CRF). The method first models and estimates the inverse CRF and then multiplies the inverse CRF by a weighting function to make it smooth near the maximum and minimum pixel values, and finally conducts the smooth inverse CRF on the input LDR image to generate HDR image. In the method, the inverse CRF is estimated using one single LDR image and an empirical model of CRF, based on measured RGB distributions at color edges. Unlike most existing methods, the proposed method expands image from both high and low luminance regions. Thus, the algorithm can avoid the artifacts and detail loss in dark area which results from extending image only from bright region. Extensive experimental results show that the approach induces less contrast distortion and produces high visual quality HDR image.
-

-
References
[1] Daly S J, Feng Xiaofan. Bit-depth extension using spatiotemporal microdither based on models of the equivalent input noise of the visual system[J]. Proceedings of SPIE, 2003, 5008: 455–466. doi: 10.1117/12.472016 [2] Daly S J, Feng Xiaofan. Decontouring: prevention and removal of false contour artifacts[J]. Proceedings of SPIE, 2004, 5292: 130–149. doi: 10.1117/12.526937 [3] Landis H. Production-ready global illumination[C]// SIGGRAPH Course Notes 16, 2002: 87–101. [4] Akyüz A O, Fleming R, Riecke B E, et al. Do HDR displays support LDR content?: a psychophysical evaluation[J]. ACM Transactions on Graphics (TOG), 2007, 26(3): 38. doi: 10.1145/1276377 [5] Masia B, Agustin S, Fleming R W, et al. Evaluation of reverse tone mapping through varying exposure conditions[J]. ACM Transactions on Graphics (TOG), 2009, 28(5): 160. [6] Huo Yongqing, Yang Fan, Dong Le, et al. Physiological inverse tone mapping based on retina response[J]. The Visual Computer, 2014, 30(5): 507–517. doi: 10.1007/s00371-013-0875-4 [7] Meylan L, Daly S, Süsstrunk S. The reproduction of specular highlights on high dynamic range displays[C]// 14th Color and Imaging Conference Final Program and Proceedings, 2006: 333–338. [8] Meylan L, Daly S, Süsstrunk S. Tone mapping for high dynamic range displays[J]. Proceedings of SPIE, 2007, 6492: 649210. doi: 10.1117/12.706472 [9] Didyk P, Mantiuk R, Hein M, et al. Enhancement of Bright Video Features for HDR Displays[J]. Computer Graphics Forum, 2008, 27(4): 1265–1274. doi: 10.1111/cgf.2008.27.issue-4 [10] Banterle F, Ledda P, Debattista K, et al. Inverse tone mapping[C]// Proceedings of the 4th International Conference on Computer Graphics and Interactive Techniques in Australasia and Southeast Asia, 2006: 349–356. [11] Banterle F, Ledda P, Debattista K, et al. A framework for inverse tone mapping[J]. The Visual Computer, 2007, 23(7): 467–478. doi: 10.1007/s00371-007-0124-9 [12] Rempel A G, Trentacoste M, Seetzen H, et al. LDR2HDR: on-the-fly reverse tone mapping of legacy video and photographs[J]. ACM Transactions on Graphics (TOG), 2007, 26(3): 39. doi: 10.1145/1276377 [13] Kovaleski R P, Oliveira M M. High-quality brightness enhancement functions for real-time reverse tone mapping[J]. The Visual Computer, 2009, 25(5–7): 539–547. doi: 10.1007/s00371-009-0327-3 [14] Wang Lvdi, Wei Liyi, Zhou Kun, et al. High dynamic range image hallucination[C]// Proceedings of the 18th Eurographics conference on Rendering Techniques, 2007: 321–326. [15] Huo Yongqing, Yang Fan, Brost V, et al. LDR image to HDR image mapping with overexposure preprocessing[J]. IEICE Transactions on Fundamentals of Electronics, Communications and Computer Sciences, 2013, E96.A(6): 1185–1194. doi: 10.1587/transfun.E96.A.1185 [16] Huo Yongqing, Yang Fan. High-dynamic range image generation from single low-dynamic range image[J]. IET Image Processing, 2016, 10(3): 198–205. doi: 10.1049/iet-ipr.2014.0782 [17] Guan Wen, Li Li, Jin Weiqi, et al. Research on HDR image fusion algorithm based on Laplace pyramid weight transform with extreme low-light CMOS[J]. Proceedings of SPIE, 2015, 9675: 967524. doi: 10.1117/12.2199818 [18] Florea C, Vertan C, Florea L. High dynamic range imaging by perceptual logarithmic exposure merging[J]. International Journal of Applied Mathematics and Computer Science, 2015, 25(4): 943–954. [19] Narahari N K, Bhat R, Vijaya R, et al. System and method to align and merge differently exposed digital images to create a HDR (High Dynamic Range) image: US20160125630[P]. 2016-05-05. [20] Grossberg M D, Nayar S K. What is the space of camera response functions?[C]// Proceedings of 2003 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 2003, 2: Ⅱ-602-9. [21] Lin S, Gu Jinwei, Yamazaki S, et al. Radiometric calibration from a single image[C]// Proceedings of the 2004 IEEE Conference on Computer Vision and Pattern Recognition, 2004, 2: Ⅱ-938–Ⅱ-945. [22] Debevec P E, Malik J. Recovering high dynamic range radiance maps from photographs[C]// Proceedings of the 24th annual conference on Computer graphics and interactive techniques, 1997: 369–378. [23] Reinhard E, Stark M, Shirley P, et al. Photographic tone reproduction for digital images[J]. ACM Transactions on Graphics (TOG), 2002, 21(3): 267–276. [24] Aydin T O, Mantiuk R, Myszkowski K, et al. Dynamic range independent image quality assessment[J]. ACM Transactions on Graphics (TOG), 2008, 27(3): 69. -
Overview

Abstract:We propose a method for generating high dynamic range (HDR) radiance maps from a single low dynamicrange (LDR) image and its camera response function (CRF). Most single-image based HDR image generation methods expand dynamic range only from bright areas which reduces details visible in shaded areas and induces artifacts atthe edge of bright areas. This inspires us to exploit an approach expanding dynamic range both from highlight regionand shaded region. The proposed method achieves this goal by performing inverse CRF on image intensity to recoverthe image irradiance which is taken as HDR image. The method first constructs inverse CRF model and computes itsoptimal solution, and then selects a weighting function and multiplies it by the optimal solution to make the inverseCRF smooth near the maximum and minimum pixel values, and finally conducts the smooth inverse CRF on the input LDR image to produce HDR image.
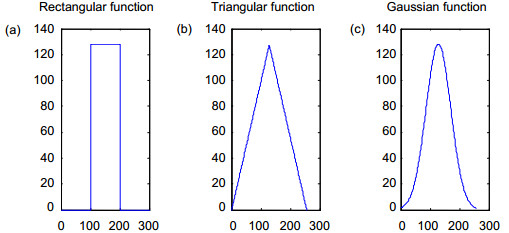
The proposed algorithm generates HDR image from single LDR image depending on inverse CRF reconstruction.The main steps include: inverse CRF estimation, inverse CRF smoothness, and HDR image generation. For inverseCRF estimation, the approach first models and then estimates inverse CRF based on the database established byGrossberg. The inverse CRF is reconstructed using the edge pixels in the LDR image based on the Grossberg’s DoRFdatabase and EMoR database, and the prior probability is empirically modeled as a Gaussian mixture model. Then, aBayesian framework is formed by combining the likelihood function with the prior model. Finally, the optimal inverseCRF is obtained by maximizing the posteriori probability (MAP). For inverse CRF smoothness, because the inverseCRF function typically has a steep slope near the minimal and maximal pixels, it is less smooth and non-monotonicnear these extremes. To solve this problem, we introduce a weighting function to make the function more smooth andreduce the effect of the pixels near the minimal and maximal in HDR image construction. The considerable choices ofweighting function are rectangular function, triangular function and Gaussian function. For HDR image generation,we can easily conduct the inverse CRF on the input LDR image to generate HDR image.
Unlike most existing methods, the proposed method expands image from both high and low luminance regions.Thus, the algorithm can avoid the artifacts and detail loss in dark area which results from extending image only frombright region. Extensive experimental results show that the approach induces less contrast distortion and produceshigh visual quality HDR image. The significance and novelty of the method include the smoothness function used inthe estimation of inverse CRF and the utilization of the inverse CRF in HDR image generation. These novelties realizeexpanding image both from bright and dark regions while guarantee the quality of generated HDR image.
-
Access History

Figures(10)
Tables(2)
Article Metrics

Export File
Citation
Li Xiaofen, Huo Yongqing. Generating HDR radiance maps from single LDR image[J]. Opto-Electronic Engineering, 2017, 44(6): 577-586. doi: 10.3969/j.issn.1003-501X.2017.06.002
Format
Content
 DownLoad:
DownLoad:


-
Figure 1.
The flowchart of the proposed method.
-
Figure 2.
Observation set of color triples. (a) Input image. (b) The detected edge and color triples.(c) The original image with color triples.
-
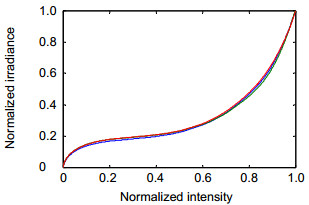
Figure 3.
The RGB inverse response curve estimated from the test image building.
-
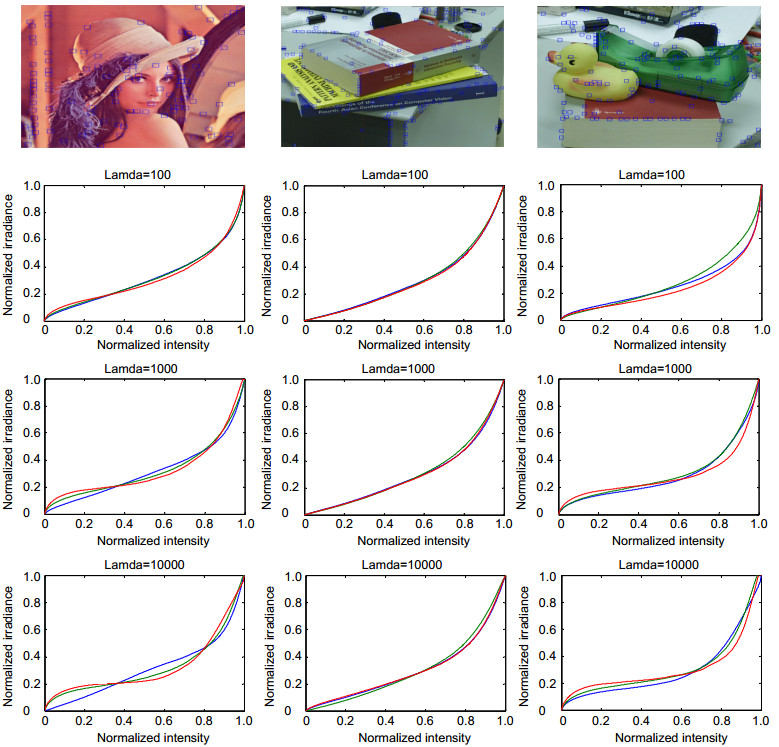
Figure 4.
The inverse response curve of input images with different λ values, from top to bottom: input image with edge detection, the curves with λ=100, λ=1000 and λ=10000.
-
Figure 5.
Three kinds of weighting functions. (a) Rectangular. (b) Triangular. (c) Gaussian.
-
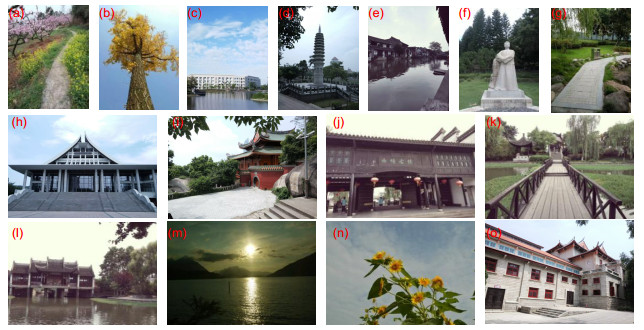
Figure 6.
Test images. (a) Farm road. (b) Tree. (c) Structure. (d) Tower. (e) Lake. (f) Statue. (g) Path. (h) Library. (i)Temple. (j) Ancient town. (k) Passageway. (l) Building. (m) Sunset. (n) Sunflower. (o) Teaching building.
-
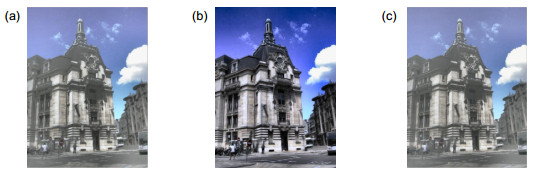
Figure 7.
The tone mapped versions of HDR images generated by the proposed method with different weighting functions.(a) The tone mapped image with rectangular weighting function. (b) The tone mapped image with triangular weightingfunction. (c) The tone mapped image with Gaussian weighting function.
-
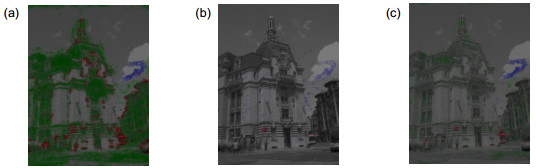
Figure 8.
The resulting metric images of the HDR images with different weighting functions. (a) Rectangular weighting function. (b) Triangular weighting function. (c) Gaussian weighting function.
-
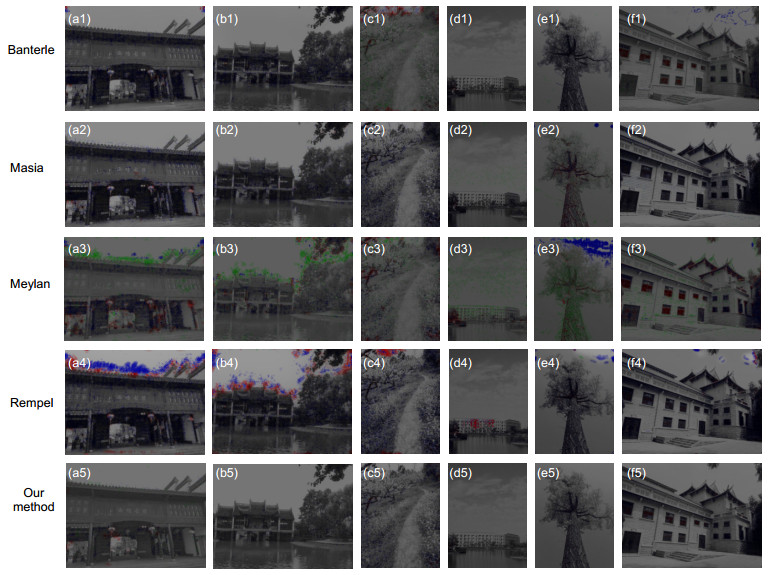
Figure 9.
The tone mapped images of compared methods. The original LDR images are (a) structure, (b) teaching building, (c) tower, (d) lake, (e) library and (f) temple.
-
Figure 10.
The metric results. (a) The original LDR images are ancient town. (b) Building. (c) Farm road. (d) Structure.(e) Tree. (f) Teaching building.


