
 E-mail Alert
E-mail Alert RSS
RSS
| Citation: |
Xi Yuding, Yu Yong, Ding Yuanyuan, et al. An optoelectronic system for fast search of low slow small target in the air[J]. Opto-Electronic Engineering, 2018, 45(4): 170654. doi: 10.12086/oee.2018.170654

|
An optoelectronic system for fast search of low slow small target in the air
-
Abstract
On the development trend of opening low altitude airspace in our country and the protection requirements for key areas, combined with the latest optoelectronic technology, a fast search method to detect low slow small target for low altitude airspace was presented, and a set of prototype system was developed. The system uses a linear CCD camera mounted on a high-precision one-dimensional turntable to collect 360-degree panoramic images of low altitude airspace. The image data is transmitted to the data processing workstation in real time through gigabit Ethernet slide ring. The data processing workstation detects small targets in the area above the skyline and figures out the orientation of target. Preliminary observation experiments of the prototype are conducted, the result shows that the system can detect low slow small target in broad low airspace in all directions. In the case of good atmospheric transparency, it can detect unmanned aerial vehicle (UAV) in size of 300 mm×300 mm×200 mm within 2300 m. The accuracy of the direction of measurement is 60 arcsecond. This research provides an effective mean to solve the problem of searching and finding low slow small targets. -

-
References
[1] 张建伟, 郭会明.低空慢速小目标拦截系统研究[J].计算机工程与设计, 2012, 33(7): 2874-2878. Zhang J W, Guo H M. Net cast interception system research aimed at low small slow target[J]. Computer Engineering and Design, 2012, 33(7): 2874-2878. [2] 吴聪, 李海飞, 王红, 等. PD雷达探测低慢小目标性能分析[J].科学技术与工程, 2013, 13(28): 8492-8496, 8519. Wu C, Li H F, Wang H, et al. Influence analysis of PD radar detecting LSS-target[J]. Science Technology and Engineering, 2013, 13(28): 8492-8496, 8519. [3] 任清安, 吕春燕.雷达光电智能协同探测技术研究[J].雷达科学与技术, 2016, 14(2): 173-177, 183. Ren Q A, Lv C Y. Research on radar and photoelectric collaborative tracking algorithm[J]. Radar Science and Technology, 2016, 14(2): 173-177, 183. [4] 李达, 李云霞, 蒙文, 等.低慢小目标面阵推进式激光成像探测方法研究[J].激光技术, 2014, 38(1): 44-48. Li D, Li Y X, Meng W, et al. Research of plane array propelled laser imaging detection for small targets at low altitude and slow speed[J]. Laser Technology, 2014, 38(1): 44-48. [5] 李菠, 孟立凡, 李晶, 等.低空慢速小目标探测与定位技术研究[J].中国测试, 2016, 42(12): 64-69. Li B, Meng L F, Li J, et al. Research on detecting and locating technology of LSS-UAV[J]. China Measurement & Test, 2016, 42(12): 64-69. [6] Kittle D S, Marks D L, Son H S, et al. A testbed for wide-field, high-resolution, gigapixel-class cameras[J]. Review of Scientific Instruments, 2013, 84(5): 053107. doi: 10.1063/1.4804199 [7] 吴翔, 于微波, 马艳辉, 等.一种新的改进Canny图像边缘检测算法[J].影像科学与光化学, 2016, 34(1): 116-121. Wu X, Yu W B, Ma Y H, et al. A new improved Canny image edge detection algorithm[J]. Imaging Science and Photochemistry, 2016, 34(1): 116-121. [8] 贾迪, 董娜, 孟祥福, 等.一种图像的连续性边缘提取方法[J].计算机工程与科学, 2015, 37(2): 384-389. Jia D, Dong N, Meng X F, et al. A method for continuous image edge extraction[J]. Computer Engineering & Science, 2015, 37(2): 384-389. [9] 薛丽霞, 李涛, 王佐成.一种自适应的Canny边缘检测算法[J].计算机应用研究, 2010, 27(9): 3588-3590. Xue L X, Li T, Wang Z C. Adaptive Canny edge detection algorithm[J]. Application Research of Computers, 2010, 27(9): 3588-3590. [10] 刘让, 王德江, 贾平, 等.红外图像弱小目标探测技术综述[J].激光与光电子学进展, 2016, 53(5): 050004. Liu R, Wang D J, Jia P, et al. Overview on small target detection technology in infrared image[J]. Laser & Optoelectronics Progress, 2016, 53(5): 050004. [11] 魏敏, 文武, 周进, 等.配准差分在深空小目标检测中的应用[J].光电工程, 2015, 42(11): 76-82. Wei M, Wen W, Zhou J, et al. Deep sky small target detection using registration difference[J]. Opto-Electronic Engineering, 2015, 42(11): 76-82. [12] 同武勤, 凌永顺, 黄超超, 等.数学形态学和小波变换的红外图像处理方法[J].光学精密工程, 2007, 15(1): 138-144. Tong W Q, Ling Y S, Huang C C, et al. Processing method of IR image based on mathematical morphology and wavelet transform[J]. Optics and Precision Engineering, 2007, 15(1): 138-144. [13] 王铎.基于形态学和邻域差值的红外小目标检测算法[J].光电技术应用, 2016, 31(2): 19-21, 30. Wang D. Infrared small target detection based on morphological and neighbor information[J]. Electro-Optic Technology Application, 2016, 31(2): 19-21, 30. [14] 吕建明, 牛燕雄, 刘海霞, 等.基于局部特性实现单帧图像小目标检测的研究[J].红外, 2014, 35(2): 37-43. Lv J M, Niu Y X, Liu H X, et al. Study of small target detection in single frame image based on local characteristics[J]. Infrared, 2014, 35(2): 37-43. [15] 戴华东, 胡谋法, 卢焕章, 等.基于连通域标记的目标检测算法设计与实现[J].现代电子技术, 2015, 38(20): 71-74. Dai H D, Hu M F, Lu H Z, et al. Design and implementation of target detection algorithm based on connected-domain labeling[J]. Modern Electronics Technique, 2015, 38(20): 71-74. [16] 王学伟, 王春歆, 张玉叶.点目标图像信噪比计算方法[J].电光与控制, 2010, 17(1): 18-21. Wang X W, Wang C X, Zhang Y Y. Research on SNR of point target image[J]. Electronics Optics & Control, 2010, 17(1): 18-21. -
Overview

Overview: With the development of technology, the maneuverability of all kinds of aviation aircraft are constantly enhanced. In recent years, low-altitude airspace has gradually opened up in our country, and man-kind low-altitude activities have increased, the management of aircraft in low-altitude airspace has become increasingly difficult. It has become a world-wide problem to prevent grand activities from the interference and damage of low slow small targets. At present, there are various methods to detect the flight targets in low altitude airspace, including radar detection, radio detection and photoelectric detection. Among them, the photoelectric detection method has the characteristics of strong anti-interference, intuitive and clear, flexible deployment and so on. Therefore, it is expected to play an important role in the search and discovery of low-slow-small targets in complex urban environment. In order to resolve the contradiction between the large field and the high resolution when using optoelectronic techniques to monitor small targets, Shanghai Astronomical Observatory developed an optical prototype system to search and find low slow small targets in low-altitude airspace. The system consists of a high-precision one-dimensional turntable platform, a large field-of-view refractor, a set of computers to control hardware and analysis images. Firstly, the linear CCD camera collects 360-degree panoramic images of low-altitude airspace in 8 seconds when the platform rotates continuously. Then the images are transferred to the computer through gigabit Ethernet slide ring and analyzed in real time. Due to factors such as human activity, trees shaking and illumination changes, it is difficult to detect slow small targets in the area below the skyline in one image. We extracted the skyline in the panoramic images and detect low slow small targets above the skyline by automatic program. Finally, the directions of targets are calculated so as to take further steps to them. And we developed a real-time display interface to show the panoramic images and the processing results. In order to achieve real-time detection of the target, two workstations are set up in the LAN and the panoramic images are processed in a distributed way. Observation experiment was carried out in July 2017, we flew an unmanned aerial vehicle (UAV) in size of 300 mm×300 mm×200 mm in different distance and in different weather in order to check the ability of the prototype system. The result shows that the prototype system can detect UAV at distance of 2.3 km when the weather is nice, the accuracy of the direction of UAV is about 1 arcminute.
-
Access History

Figures(12)
Tables(2)
Article Metrics

Export File
Citation
Xi Yuding, Yu Yong, Ding Yuanyuan, et al. An optoelectronic system for fast search of low slow small target in the air[J]. Opto-Electronic Engineering, 2018, 45(4): 170654. doi: 10.12086/oee.2018.170654
Format
Content
 DownLoad:
DownLoad:


-
Figure 1.
Image of acquisition platform
-
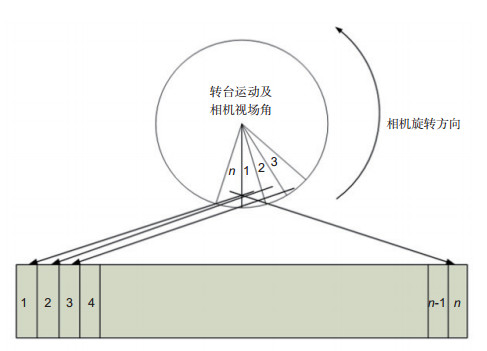
Figure 2.
Image acquisition methods
-
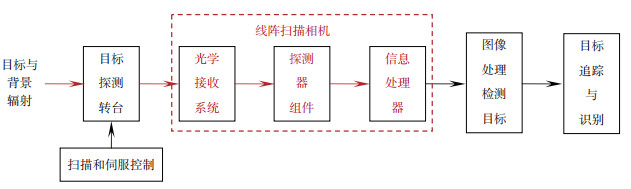
Figure 3.
Low and slow small target search discovery system composition block diagram
-
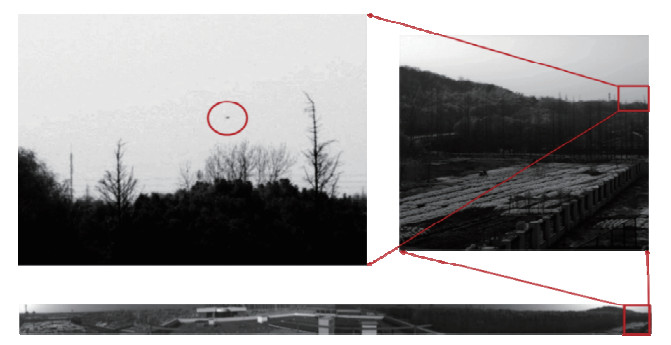
Figure 4.
UAV in panoramic images
-
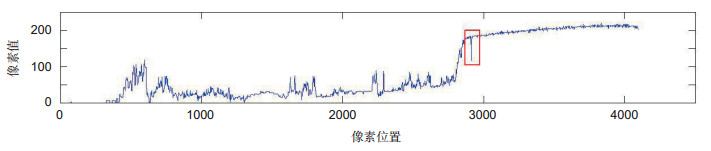
Figure 5.
Gray value distribution of the image column UAV target located
-
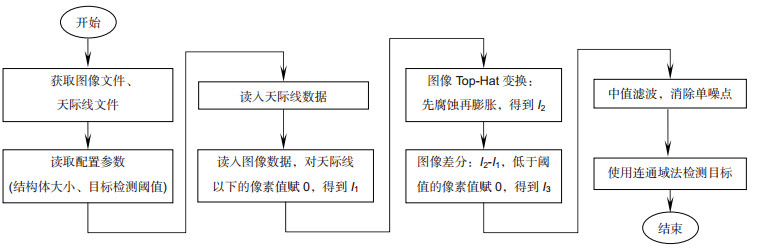
Figure 6.
Image target detection process based on single frame
-
Figure 7.
Example of extracting results from the skyline
-
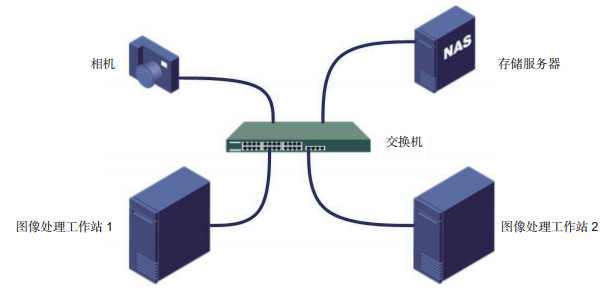
Figure 8.
Principle of Image distributed processing
-
Figure 9.
Point marker for direction-finding
-
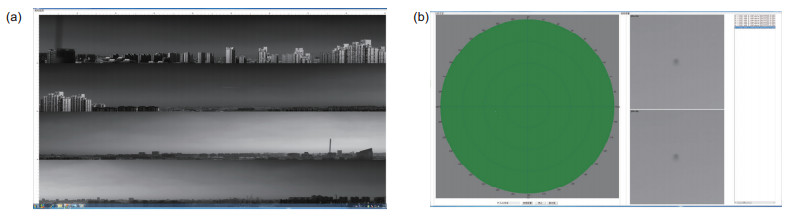
Figure 10.
Panoramic image (a) and processing results real-time display interface (b)
-
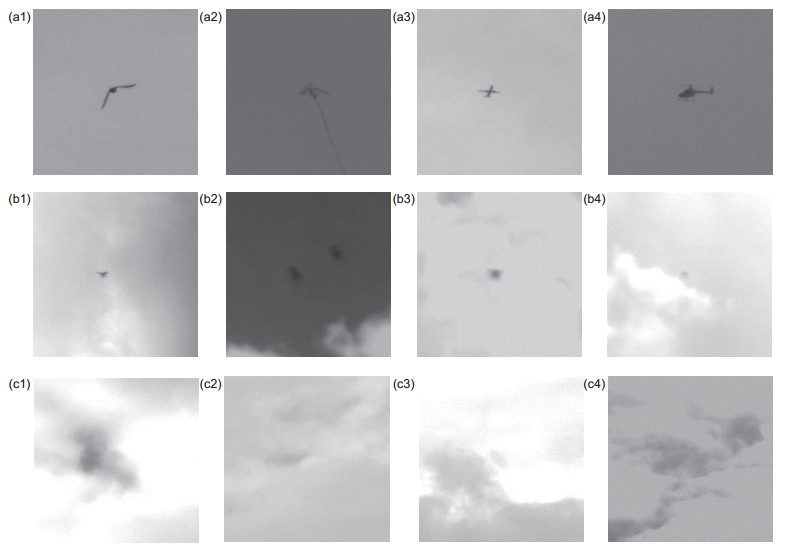
Figure 11.
Some samples of low slow small target detected. (a1)~(a4) Different kinds of low slow small targets; (b1)~(b4) Low slow small targets in complex context; (c1)~(c4) Mistakenly detected targets
-
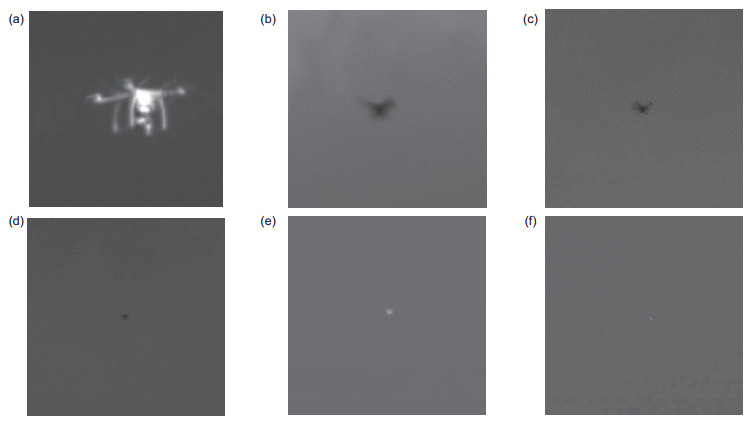
Figure 12.
Target detection result in different distances. (a) 50 m; (b) 100 m; (c) 200 m; (d) 500 m; (e) 1000 m; (f) 2300 m


