
 E-mail Alert
E-mail Alert RSS
RSS
-
摘要:
为更好地应对跟踪过程中复杂的场景变化问题,提出一种采用多种特征融合进行跟踪的方法。算法在粒子滤波的框架下,通过在跟踪过程中对每一个特征进行不确定性度量,计算动态的特征权值,从而完成了自适应的特征融合。利用颜色、空间和纹理特征的互补特性,提升了算法的跟踪性能。实验结果表明,算法能够很好地适应目标尺度、旋转、运动模糊等复杂场景的变化。与近年来流行的算法相比,所提出的算法具有明显优势,能够很好地完成跟踪任务。
 Abstract:
Abstract:In order to deal with complex scene change problem in the tracking process, we propose a tracking algorithm via multiple feature fusion. Under the framework of particle filter, dynamic feature weights are calculated by making an uncertain measure of each feature in the tracking process, which results in adaptive feature fusion. The algorithm uses the complementarity of color, space and texture features to improve the tracking performance. Experimental results show that the algorithm can adapt to complex scene changes such as scale, rotation and motion blur. Compared with traditional algorithms, the proposed algorithm has obvious advantages to complete the tracking task.
-
Key words:
- visual tracking /
- feature fusion /
- color /
- space /
- texture
-

Overview: In order to deal with complex scene change problem in the tracking process, we propose a tracking algorithm via multiple feature fusion. Due to the computational convenience, single feature descriptor is widely used in visual tracking for target model expression. However, single feature descriptor is usually not enough to describe the complex characteristics and changes of target. The target representation combined with multiple feature descriptors can improve the overall performance of visual tracking, because different features can provide complementary target information. How to effectively combine multiple features to make the algorithm truly improve performance is the most important issue for the multi-feature fusion algorithm. Therefore, we use a method of uncertainty measurement, by measuring the reliability of feature to determine the influence of it. Under the framework of particle filter, dynamic feature weights are calculated by making an uncertain measure of each feature in the tracking process, which results in adaptive feature fusion. This method adjusts the influence of features on tracking according to the uncertainty of features, so that the reliable feature has a stronger influence. In addition, color feature is robust to changes in rotation, scaling, etc., but difficult to cope with changes in illumination variation. Spatial feature contains the spatial information of target, which can make up for the lack of spatial information in color histogram. Texture feature is not sensitive to changes in illumination variation and not easily affected by local deviations. Therefore, if we fuse these three kinds of complementary features, the target expression can be provided by these features, and it can provide more effective target information. Based on the above discussions, the algorithm uses the complementarity of color, space and texture features to improve the tracking performance. Experimental results show that the algorithm can adapt to complex scene changes such as scale, rotation and motion blur. Compared with traditional algorithms, the proposed algorithm has obvious advantages to complete the tracking task. In order to verify the performance of the algorithm in this paper, we programmed it through MATLAB2009a, and tested a large number of experiments on the computer with 4 GB memory. We chose ACT, ASLA, DLT, DSST, and LLC as contrast algorithm, which have good performance. The figure shows the overall tracking accuracy and success rate of 30 videos in OTB2013 dataset. It can be seen from the figure that the accuracy and success rate of proposed algorithm are the highest of these six algorithms. The overall tracking performance of ours algorithm is the best, which can better adapt to different tracking environment and target changes.
-

-
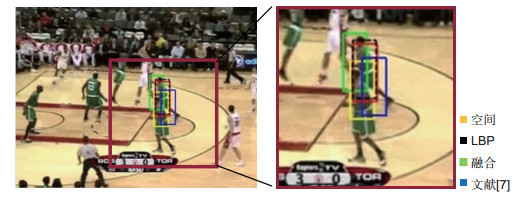
图 2 单一特征与本文算法在Basketball序列的跟踪比较
Figure 2. Comparison between the tracking results of single features and ours in Basketball sequence
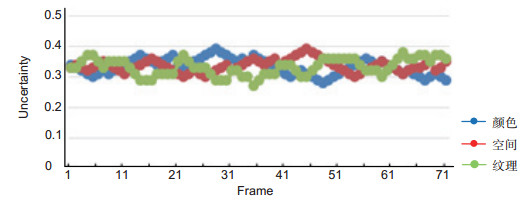
图 3 不同特征在Deer序列中的不确定性比较
Figure 3. Uncertainty comparison of different features in Deer sequence

图 4 跟踪算法性能的定性比较。(a) David3系列;(b) Deer系列;(c) Football系列;(d) Lemming系列;(e) Liquor系列;(f) Matrix系列;(g) Mountainbike系列;(h) Skiing系列;(i) Basketball系列;(j) Boy系列
Figure 4. Qualitative comparison of the six tracking algorithms. (a) David3 series; (b) Deer series; (c) Football series; (d) Lemming series; (e) Liquor series; (f) Matrix series; (g) Mountainbike series; (h) Skiing series; (i) Basketball series; (j) Boy series
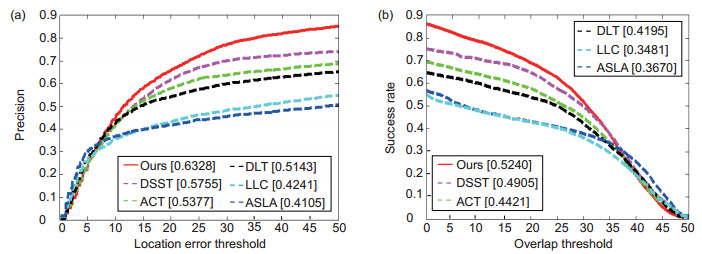
图 5 整体精度(a)和成功率(b)比较
Figure 5. Overall comparison of precision (a) and success rate (b)
表 1 部分跟踪视频结果比较
Table 1. Comparison of partial tracking results
名称 ACT ASLA DLT DSST LLC Ours David3 74.6(9.1) 51.6(87.8) 32.9(107.4) 54.0(88.4) 11.9(286.8) 72.3(16.1) Deer 100(5.1) 2.8(160.1) 38.0(49.1) 93.0(8.5) 2.8(216.3) 71.4(15.2) Football1 48.7(9.8) 44.6(12.2) 52.4 (10.4) 41.9(20.5) 70.3(15.4) 52.5(11.6) Lemming 31.3(90.7) 16.9(178.8) 28.0(128.9) 46.0(81.5) 17.0(158.8) 85.9(15.3) Liquor 20.8(326.4) 23.6(146.7) 20.5(153.3) 40.8(99.3) 24.2(180.6) 82.1(28.5) Matrix 1.00(79.2) 2.0(65.2) 2.0(171.1) 21.0(59.7) 16.0(63.4) 32.1(38.7) Mountain bike 100(6.8) 91.2(9.0) 84.2(13.1) 100(7.8) 100(7.9) 83.7(18.5) Skiing 9.9(274.9) 11.1(266.6) 7.4(244.5) 7.4(220.1) 11.1(269.5) 25.7(96.2) Basketball 25.9(89.1) 71.6(18.0) 49.7(13.9) 64.0(73.1) 62.5(73.8) 91.3(9.6) Boy 71.6(8.8) 48.3(106.7) 100(2.5) 17.1(179.5) 12.6(163.2) 91.5(5.2) 注:括号前的数字表示覆盖率为0.5时的成功率(%),括号内数字表示平均中心误差(像素)。每个图像序列对应的最优算法标为红色,次优算法标为绿色。  下载: 导出CSV
下载: 导出CSV
-
[1] Verma K K, Kumar P, Tomar A. Analysis of moving object detection and tracking in video surveillance system[C]//Proceedings of the 2nd International Conference on Computing for Sustainable Global Development, 2015: 1759-1762.
[2] Tsai F S, Hsu S Y, Shih M H. Adaptive tracking control for robots with an interneural computing scheme[J].IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(4): 832-844. doi: 10.1109/TNNLS.2017.2647819
[3] Gu Q, Yang J Y, Zhai Y Q, et al. Vision-based multi-scaled vehicle detection and distance relevant mix tracking for driver assistance system[J]. Optical Review, 2015, 22(2): 197-209. doi: 10.1007/s10043-015-0067-8
[4] Ma L, Lu J W, Feng J J, et al. Multiple feature fusion via weighted entropy for visual tracking[C]//Proceedings of 2015 IEEE International Conference on Computer Vision, 2015: 3128-3136.
[5] Dou J F, Li J X. Robust visual tracking based on interactive multiple model particle filter by integrating multiple cues[J]. Neurocomputing, 2014, 135: 118-129. doi: 10.1016/j.neucom.2013.12.049
[6] Chen D P, Yuan Z J, Wu Y, et al. Constructing adaptive complex cells for robust visual tracking[C]//Proceedings of 2013 IEEE International Conference on Computer Vision, 2013: 1113-1120.
[7] 鲁琴, 肖晶晶, 罗武胜.基于多尺度混合模型多特征融合的单目标跟踪[J].光电工程, 2016, 43(7): 16-21. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gdgc201607003
Lu Q, Xiao J J, Luo W S. Single target tracking with multi-feature fusion in multi-scale models[J]. Opto-Electronic Engineering, 2016, 43(7): 16-21. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gdgc201607003
[8] 顾鑫, 王海涛, 汪凌峰, 等.基于不确定性度量的多特征融合跟踪[J].自动化学报, 2011, 37(5): 550-559. http://www.nlpr.ia.ac.cn/2011papers/gnkw/nk5.pdf
Gu X, Wang H T, Wang L F, et al. Fusing multiple features for object tracking based on uncertainty measurement[J]. Acta Automatica Siniaca, 2011, 37(5): 550-559. http://www.nlpr.ia.ac.cn/2011papers/gnkw/nk5.pdf
[9] 刘晴, 唐林波, 赵保军, 等.基于自适应多特征融合的均值迁移红外目标跟踪[J].电子与信息学报, 2012, 34(5): 1137-1141. http://d.wanfangdata.com.cn/Periodical_dzkxxk201205020.aspx
Liu Q, Tang L B, Zhao B J, et al. Infrared target tracking based on adaptive multiple features fusion and mean shift[J]. Journal of Electronics & Information Technology, 2012, 34(5): 1137-1141. http://d.wanfangdata.com.cn/Periodical_dzkxxk201205020.aspx
[10] 李培华.一种改进的Mean Shift跟踪算法[J].自动化学报, 2007, 33(4): 347-354. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kxjsygc201017047
Li P H. An improved mean shift algorithm for object tracking[J]. Acta Automatica Sinica, 2007, 33(4): 347-354. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kxjsygc201017047
[11] Choi E, Lee C. Feature extraction based on the Bhattacharyya distance for multimodal data[C]//Proceedings of 2001 IEEE International Geoscience and Remote Sensing Symposium, 2001: 524-526.
[12] 姚志均.一种新的空间直方图相似性度量方法及其在目标跟踪中的应用[J].电子与信息学报, 2013, 35(7): 1644-1649. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=dzkxxk201307019
Yao Z J. A new spatiogram similarity measure method and its application to object tracking[J]. Journal of Electronics & Information Technology, 2013, 35(7): 1644-1649. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=dzkxxk201307019
[13] Zhao G Y, Pietikainen M. Dynamic texture recognition using local binary patterns with an application to facial expressions[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2007, 29(6): 915-928. doi: 10.1109/TPAMI.2007.1110
[14] Danelljan M, Khan F S, Felsberg M, et al. Adaptive color attributes for real-time visual tracking[C]//Proceedings of 2014 IEEE Conference on Computer Vision and Pattern Recognition, 2014: 1090-1097.
[15] Jia X, Lu H C, Yang M H. Visual tracking via adaptive structural local sparse appearance model[C]//Proceedings of 2012 IEEE Conference on Computer Vision and Pattern Recognition, 2012: 1822-1829.
[16] Wang N Y, Yeung D Y. Learning a deep compact image representation for visual tracking[C]//Proceedings of the 27th Annual Conference on Neural Information Processing Systems, 2013: 809-817.
[17] Danelljan M, Hager G, Khan F S, et al. Accurate scale estimation for robust visual tracking[C]//Proceedings of the British Machine Vision Conference 2014, 2014: 1-11.
[18] Wang G F, Qin X Y, Zhong F, et al. Visual tracking via sparse and local linear coding[J]. IEEE Transactions on Image Processing, 2015, 24(11): 3796-3809. doi: 10.1109/TIP.2015.2445291
[19] Wu G F, Li J W, Yang M H. Online object tracking: a benchmark[C]//Proceedings of 2013 IEEE Conference on Computer Vision and Pattern Recognition, 2013: 2411-2418.
-
 点击扫一扫
点击扫一扫

图(5)
表(1)
计量
- 文章访问数: 7229
- PDF下载数: 3157
- 施引文献: 0


