
 E-mail Alert
E-mail Alert RSS
RSS
| Citation: |
Zhao Kai, Xu Youchun, Wang Rendong. A preprocessing method of 3D point clouds registration in urban environments[J]. Opto-Electronic Engineering, 2018, 45(12): 180266. doi: 10.12086/oee.2018.180266

|
A preprocessing method of 3D point clouds registration in urban environments
-
Abstract
Aiming at the problem that 3D LiDAR point cloud has high data density, outlier noise, and scattered distribution in urban environment, which is not conducive to the matching between point clouds in the later stage, a pre-processing method for large-scale LiDAR point cloud frame matching in urban environments is proposed. First, the point cloud data is transformed into a Mean Elevation Map, and the ground point segmentation processing is performed on the point cloud using the height gradient between the grids; then, the DBSCAN clustering algorithm is improved by the three-dimensional voxel grid division method, and the improved VG-DBSCAN is used to cluster point clouds and separate the target point cloud from the outliers after clustering, thereby, which eliminates outlier noises in the point cloud. Finally, the Voxel Grid filter is used to down sample the point cloud. The experimental results show that the proposed method can perform real-time preprocessing on point cloud data, and the average time is 132.1 ms. After pre-processing, the accuracy of point cloud frame matching is increased by 2 times, and the average time consumption is only 1/6 before pre-processing. -

-
References
[1] Kim J U, Kang H B. LiDAR Based 3D object detection using CCD information[C]//IEEE Third International Conference on Multimedia Big Data, 2017: 303-309. [2] 韩栋斌, 徐友春, 李华, 等.基于手眼模型的三维激光雷达外参数标定[J].光电工程, 2017, 44(8): 798-804. doi: 10.3969/j.issn.1003-501X.2017.08.006 Han D B, Xu Y C, Li H, et al. Calibration of extrinsic parameters for three‐dimensional lidar based on hand‐eye model[J]. Opto-Electronic Engineering, 2017, 44(8): 798-804. doi: 10.3969/j.issn.1003-501X.2017.08.006 [3] Biosca J M, Lerma J L. Unsupervised robust planar segmentation of terrestrial laser scanner point clouds based on fuzzy clustering methods[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2008, 63(1): 84-98. doi: 10.1016/j.isprsjprs.2007.07.010 [4] Himmelsbach M, Hundelshausen F V, Wuensche H J. Fast segmentation of 3D point clouds for ground vehicles[C]// Proceedings of 2010 IEEE Intelligent Vehicles Symposium, 2010: 560-565. http://ieeexplore.ieee.org/document/5548059 [5] Moosmann F, Pink O, Stiller C. Segmentation of 3D lidar data in non-flat urban environments using a local convexity criterion[C]// Proceedings of 2009 IEEE Intelligent Vehicles Symposium, 2009: 215-220. http://ieeexplore.ieee.org/document/5164280/ [6] 张名芳, 付锐, 郭应时, 等.基于三维不规则点云的地面分割算法[J].吉林大学学报(工学版), 2017, 47(5): 1387-1394. Zhang M F, Fu R, Guo Y S, et al. Road segmentation method based on irregular three dimensional point cloud[J]. Journal of Jilin University (Engineering and Technology Edition), 2017, 47(5): 1387-1394. [7] Fleishman S, Drori I, Cohen-Or D. Bilateral mesh denoising[J]. ACM Transactions on Graphics, 2003, 22(3): 950-953. doi: 10.1145/882262 [8] 李仁忠, 杨曼, 冉媛, 等.基于方法库的点云去噪与精简算法[J].激光与光电子学进展, 2018, 55(1): 011008. Li R Z, Yang M, Ran Y, et al. Point cloud denoising and simplification algorithm based on method library[J]. Laser & Optoelectronics Progress, 2018, 55(1): 011008. [9] 苏本跃, 马金宇, 彭玉升, 等.基于K-means聚类的RGBD点云去噪和精简算法[J].系统仿真学报, 2016, 28(10): 2329-2334, 2341. Su B Y, Ma J Y, Peng Y S, et al. Algorithm for RGBD point cloud denoising and simplification based on K-means clustering[J]. Journal of System Simulation, 2016, 28(10): 2329-2334, 2341. [10] Siciliano B, Khatib O. Springer Handbook of Robotics[M]. Berlin, Heidelberg: Springer-Verlag, 2007. [11] Ester M, Kriegel H P, Sander J, et al. A density-based algorithm for discovering clusters a density-based algorithm for discovering clusters in large spatial databases with noise[C]//Proceedings of the 2nd International Conference on Knowledge Discovery and Data Mining, 1996: 226-231. [12] Rusu R B, Cousins S. 3D is here: Point Cloud Library (PCL)[C]// Proceedings of IEEE International Conference on Robotics and Automation, 2011: 1-4. -
Overview

Overview: Aiming at the problem that LiDAR point cloud data density is high in urban 3D environment, there are many outlier noises, and the scattered distribution is not conducive to the matching of point clouds in the later period, a preprocessing method for 3D LiDAR point cloud matching in urban complex environments is proposed. The method includes three parts: ground segmentation, outlier noise filtering, and downsampling.
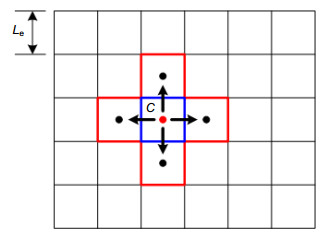
The road surface segmentation method converts the point cloud into a mean elevation map, uses the gradient difference between the grids to divide the grid, and then accurately separates ground points from non-ground points. Then, the DBSCAN algorithm is improved by using a three-dimensional voxel grid partitioning method. The improved algorithm divides the three-dimensional point cloud data into multiple adjacent segments with a voxel grid as a unit according to dimensions, and creates a grid cell. The set of components, which greatly reduces the search scope of each object in the data space neighborhood, as long as the current object's spatially adjacent grid cells can be scanned to achieve its neighbors, rapid discovery of each cluster. The comparison experiments show that the proposed algorithm is superior to the existing typical methods in point cloud denoising, simplification and time-consuming. After the ground segmentation and denoising, the number of three-dimensional LiDAR point clouds and the point cloud density are still quite large. A lot of data describe the environment more accurately, but at the same time it also imposes a huge burden on the computational efficiency of the algorithm. Therefore, the third step of the preprocessing of point cloud data is downsampling of the data frame. In this paper, point cloud data is mainly used for point cloud inter-frame matching, and the point cloud density can be appropriately reduced to improve the efficiency of the algorithm without affecting the representation of environmental features. The downsampling method based on the Voxel Grid filter greatly reduces the size of the point cloud by replacing the grid with the center of gravity of all points in the voxel grid.
The above three processes can preserve the geometric characteristics of the non-ground point cloud while reducing the size of the point cloud, ensuring that the feature information will not be lost as the number of point clouds decreases, and the preprocessing process will take a short time. Realize real-time processing. Applying the pre-processing method to point cloud inter-frame matching can not only filter out a large number of outlier noises in the two-frame point cloud, but also significantly reduce the size of the two-frame point cloud. Experimental results show that the pretreatment method proposed in this paper can significantly improve the accuracy of matching and reduce the time-consuming matching.
-
Access History
Figures(11)
Tables(3)
Article Metrics

Export File
Citation
Zhao Kai, Xu Youchun, Wang Rendong. A preprocessing method of 3D point clouds registration in urban environments[J]. Opto-Electronic Engineering, 2018, 45(12): 180266. doi: 10.12086/oee.2018.180266
Format
Content
 DownLoad:
DownLoad:



-
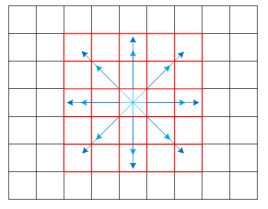
Figure 1.
Grid neighborhood
-
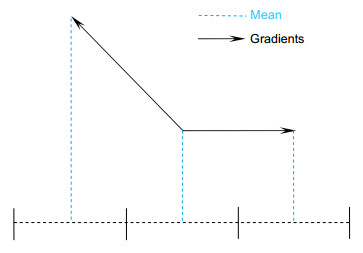
Figure 2.
Analysis of the causes of method errors
-
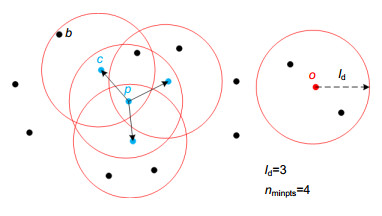
Figure 3.
The core idea of DBSCAN algorithm
-
Figure 4.
Dividing a three-dimensional voxel grid. (a) Three-dimensional voxel grid; (b) Grid unit
-
Figure 5.
Two-dimensional illustration of a layer in a voxel grid
-
Figure 6.
A brief example of a merged cluster
-
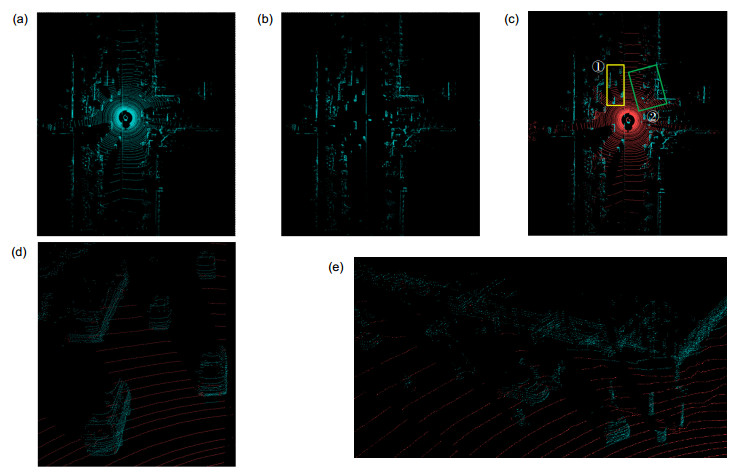
Figure 7.
Ground segmentation results. (a) Before the ground division; (b) After the ground division; (c) Division of the overall effect; (d) ① frame selection part; (e) ② frame selection part
-
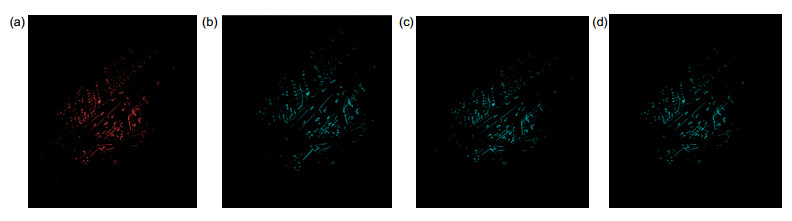
Figure 8.
Point clouds remove outlier noise results. (a) Point cloud before denoising; (b) Statistical filter denoising; (c) Radius filtering denoising; (d) VG-DBSCAN clustering filter
-
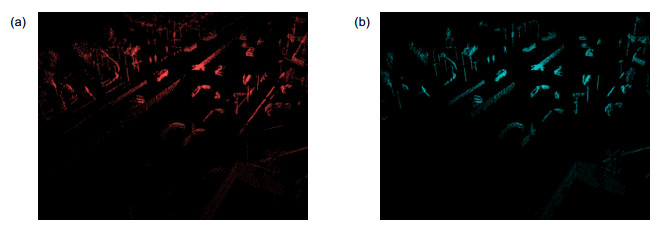
Figure 9.
VG-DBSCAN filter denoising local effect. (a) Before denoising; (b) After denoising
-
Figure 10.
Comparison before and after downsampling
-
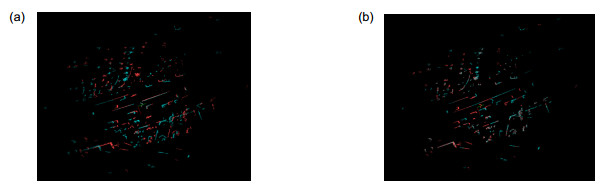
Figure 11.
Comparison before and after interframe matching


