
 E-mail Alert
E-mail Alert RSS
RSS
| Citation: |

|
Composite compensation control method for airborne opto-electronic platform mounted on multi-rotor UAV
-
Abstract
In order to compensate disturbance and accomplish the stabilized tracking control for airborne platform mounted on multi-rotor unmanned aerial vehicle (MUAV), a self-adjusting tracking control method based on an improved disturbance observer (DOB) and radial basis function (RBF) neural network approximation is proposed. First, a compensated control is introduced into feedback loop in the structure of original disturbance observer, an improved disturbance observer is established based on velocity signals, and the ability of disturbance compensation and robustness are analyzed. Second, aiming at the compensation problem of nonlinear unknown disturbance, a method based on the RBF neural network (RBFNN) approximation properties is utilized. Finally, a composite compensation control structure is designed based on Lyapunov stability theory. The experimental results show that after applying the proposed method, the disturbance of airborne opto-electronic platform is compensated effectively. The proposed method has high precision and stable tracking control performance, and it can fully meet the requirement of airborne opto-electronic platform stability control. -

-
References
[1] 高文. 机载光电平台目标跟踪技术的研究[D]. 长春: 中国科学院长春光学精密机械与物理研究所, 2012. Gao Wen. Research on the target tracking application to photoelectricity platform[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2012. [2] Mei Y, Zhao H Y, Guo S Y. The analysis of image stabilization technology based on small-UAV airborne video[C]// Proceedings of 2012 IEEE International Conference on Computer Science and Electronics Engineering, 2012: 586-589. [3] 邱宝梅, 万吉权, 王建文.机载摄影稳定平台的自抗扰控制[J].光电工程, 2012, 39(4): 21-26. Qiu Baomei, Wan Jiquan, Wang Jianwen. Active disturbance rejection controller of the aerial photography stabilized platform[J]. Opto-Electronic Engineering, 2012, 39(4): 21-26. [4] 王日俊. 多旋翼无人飞行器载荷稳像技术研究[D]. 长春: 中国科学院长春光学精密机械与物理研究所, 2015. Wang Rijun. Study on image stabilization technology for the payload of mUAV[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2015. [5] Chen W H, Yang J, Guo L, et al. Disturbance-observer-based control and related methods: an overview[J]. IEEE Transactions on Industrial Electronics, 2016, 63(2): 1083-1095. doi: 10.1109/TIE.2015.2478397 [6] 任彦, 刘正华, 周锐.滑模干扰观测器在低速光电跟踪系统中的应用[J].北京航空航天大学学报, 2013, 39(6): 835-840. Ren Yan, Liu Zhenghua, Zhou Rui. Application of low speed opto-electronic tracking systems based on sliding mode disturbance observer[J]. Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(6): 835-840. [7] Lee M H, Park H G, Lee W B, et al. On the design of a disturbance observer for moving target tracking of an autonomous surveillance robot[J]. International Journal of Control, Automation and Systems, 2012, 10(1): 117-125. doi: 10.1007/s12555-012-0113-2 [8] 李嘉全, 丁策, 孔德杰, 等.基于速度信号的扰动观测器及在光电稳定平台的应用[J].光学精密工程, 2011, 19(5): 998-1004. Li Jiaquan, Ding Ce, Kong Dejie, et al. Velocity based disturbance observer and its application to photoelectric stabilized platform[J]. Optics and Precision Engineering, 2011, 19(5): 998-1004. [9] 谢巍, 何忠亮.采用改进型扰动观测器的控制方法[J].控制理论与应用, 2010, 27(6): 695-700. Xie Wei, He Zhongliang. Control method with improved disturbance observer[J]. Control Theory and Applications, 2010, 27(6): 695-700. [10] 王日俊, 白越, 续志军, 等.基于扰动观测器的多旋翼无人机机载云台模糊自适应跟踪控制[J].浙江大学学报(工学版), 2015, 49(10): 2005-2012. Wang Rijun, Bai Yue, Xu Zhijun, et al. Fuzzy self-adjusting tracking control based on disturbance observer for airborne platform mounted on multi-rotor unmanned aerial vehicle[J]. Journal of Zhejiang University (Engineering Science), 2015, 49(10): 2005-2012. [11] 朱海荣, 李奇, 顾菊平, 等.扰动补偿的陀螺稳定平台单神经元自适应PI控制[J].电机与控制学报, 2012, 16(3): 65-70, 77. Zhu Hairong, Li Qi, Gu Juping, et al. Single-neuron adaptive PI control of the gyrostabilized platform based on disturbance compensation[J]. Electric Machines and Control, 2012, 16(3): 65-70, 77. [12] Khalil H K. Nonlinear system[M]. 3rd edition. New Jersey: Prentice Hall, 2002: 24. [13] 扈宏杰, 王元哲.机载光电平台的复合补偿控制方法[J].光学精密工程, 2012, 20(6): 1272-1281. Hu Hongjie, Wang Yuanzhe. Composite compensation control scheme for airborne opto-electronic platform[J]. Optics and Precision Engineering, 2012, 20(6): 1272-1281. -
Overview

Recently, multi-rotor unmanned aerial vehicle (MUAV) has been widely used in military and civilian fields. Airborne opto-electronic platform (AOEP) is the key to the application of MUAV, such as target reconnaissance, identification and tracking. The imaging quality, recognition accuracy and tracking accuracy of airborne opto-electronic devices, to a large extent, depend on the stable control performance of the AOEP. Unfortunately, the AOEP is vulnerably affected by air disturbance, vibration and other unknown disturbance factors during the flight operation process, which seriously influences the stability and accuracy, and even leads to reconnaissance and tracking tasks failure. Therefore, how to improve the anti-disturbance ability of the AOEP has become the key problem, which restricts the development and applications of the MUAV severely. It has been one of the hot research directions in recent years.
For the problem of disturbance compensation of airborne stabilized platform, the control method based on disturbance observer (DOB) has been widely used. To a certain extent, the stability control performance of the airborne stabilized platform is improved. However, the compensation effect of DOB on high frequency noise is not ideal. Simultaneously, disturbance usually has strong nonlinearity. It is difficult to obtain ideal tracking control performance by using DOB method only. Fortunately, neural networks and fuzzy systems are real-time, robust, and can approximate any function. They have been widely used in the tracking control system of stabilized platform.
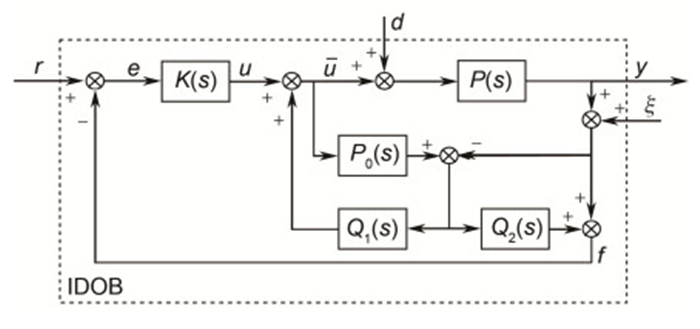
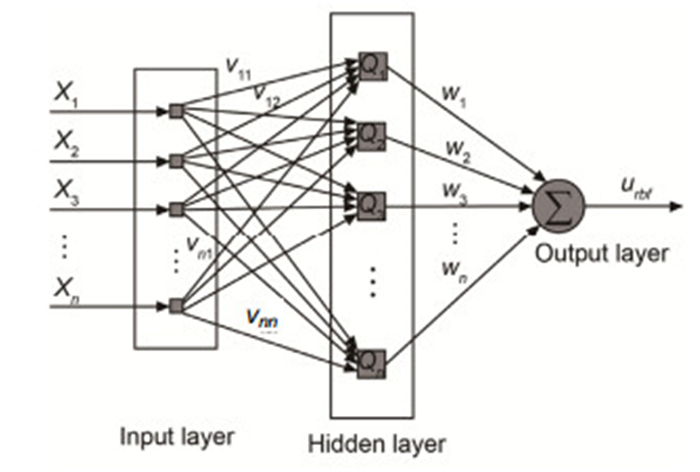
Aiming at the disturbance compensation and stability control of AOEP, a composite compensation control method for AOEP mounted on MUAV is proposed. First, to eliminate the effects of high frequency noise, by introducing a compensation control into the original DOB structure, an improved disturbance observer (IDOB) based on the velocity signal is proposed. Second, considering the nonlinearity of the disturbance, the radial basis function neural network (RBFNN) is used to estimate and compensate the nonlinear disturbance. In order to realize the stable control of AOEP, a composite compensation control system based on IDOB and RBFNN is designed by using Lyapunov stability principle. It is proved that the proposed control system is asymptotically stable and the tracking error is bounded. It has good stability and robustness. Finally, the effectiveness of the method is verified by experiments. The experimental results show that the IDOB structure has better disturbance rejection ability and has higher stability accuracy. The proposed method can restrain the effect of disturbance to the AOEP system. The AOEP has higher stability and tracking precision. The composite compensation control system completely satisfies the requirements of tracking control of AOEP.
-
Access History
Figures(8)
Tables(1)
Article Metrics


Export File
Citation
Format
Content
 DownLoad:
DownLoad:

-
Figure 1.
Structure of IDOB.
-
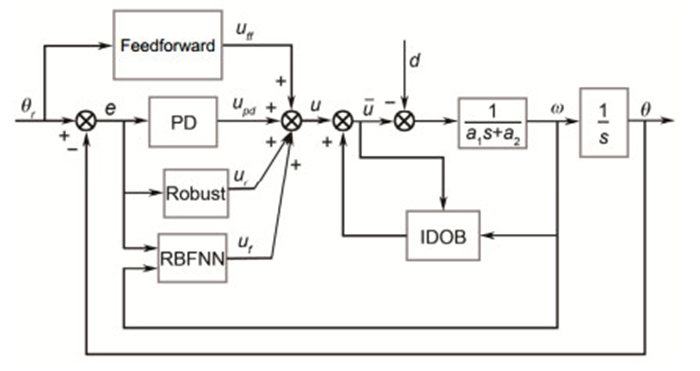
Figure 2.
Structure of composite control system based on RBFNN.
-
Figure 3.
Structure diagram of RBFNN.
-
Figure 4.
Airborne opto-electronic platform mounted on mUAV for experiment.
-
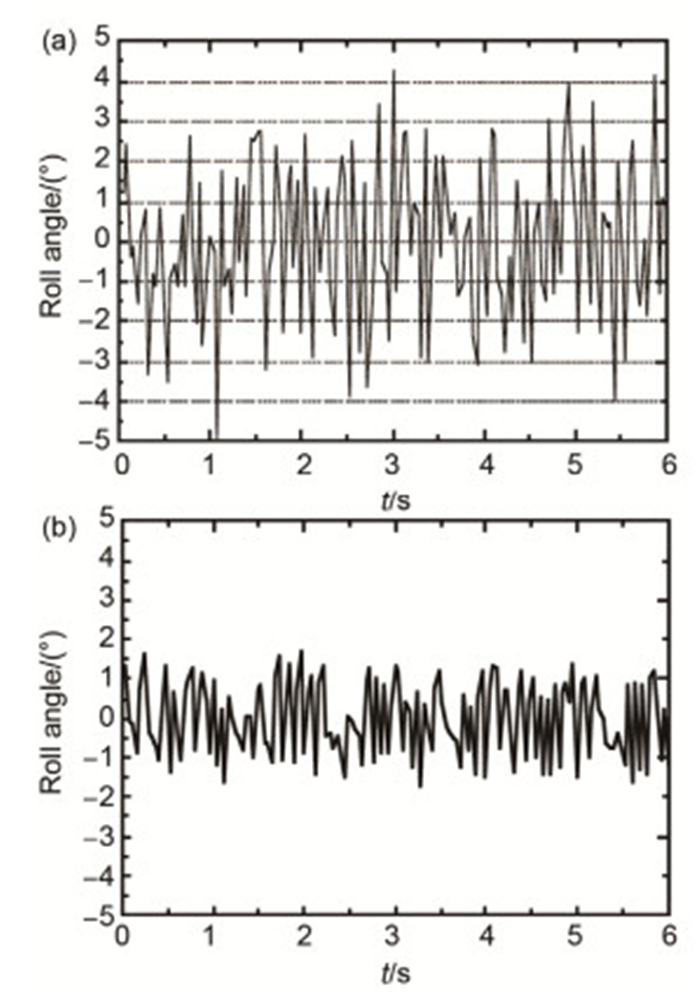
Figure 5.
Comparison results of line of sight error. (a) DOB. (b) IDOB.
-
Figure 6.
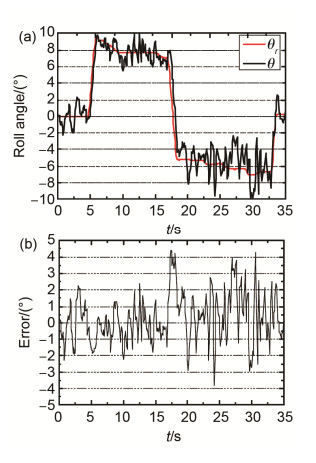
Position tracking curve without RBFNN. (a) Position tracking curve. (a) Position tracking error.
-
Figure 7.
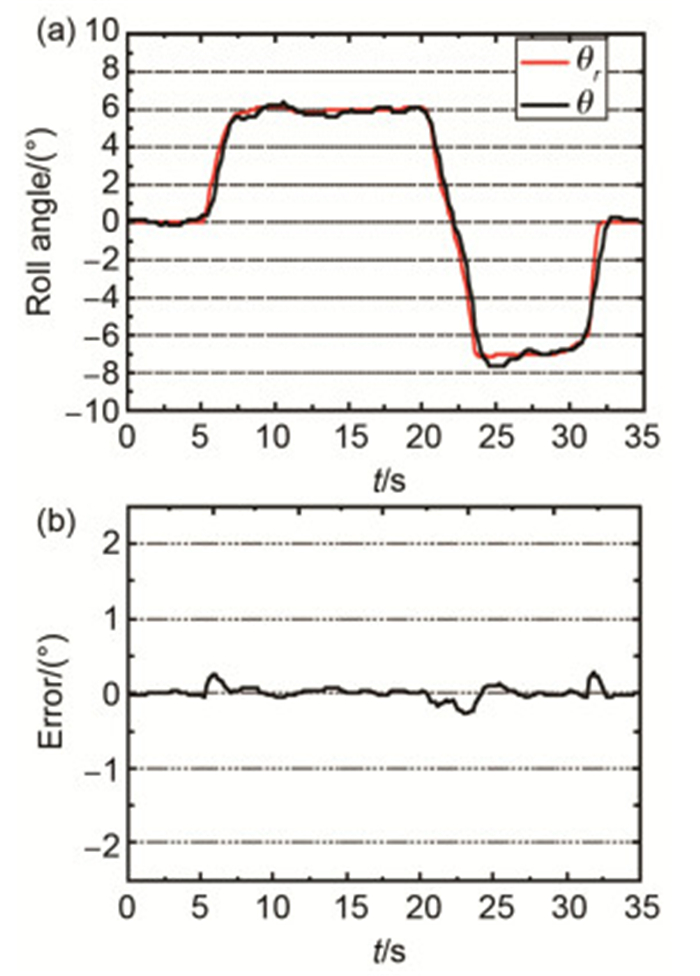
Position tracking curve with RBFNN. (a) Position tracking curve. (b) Position tracking error.
-
Figure 8.
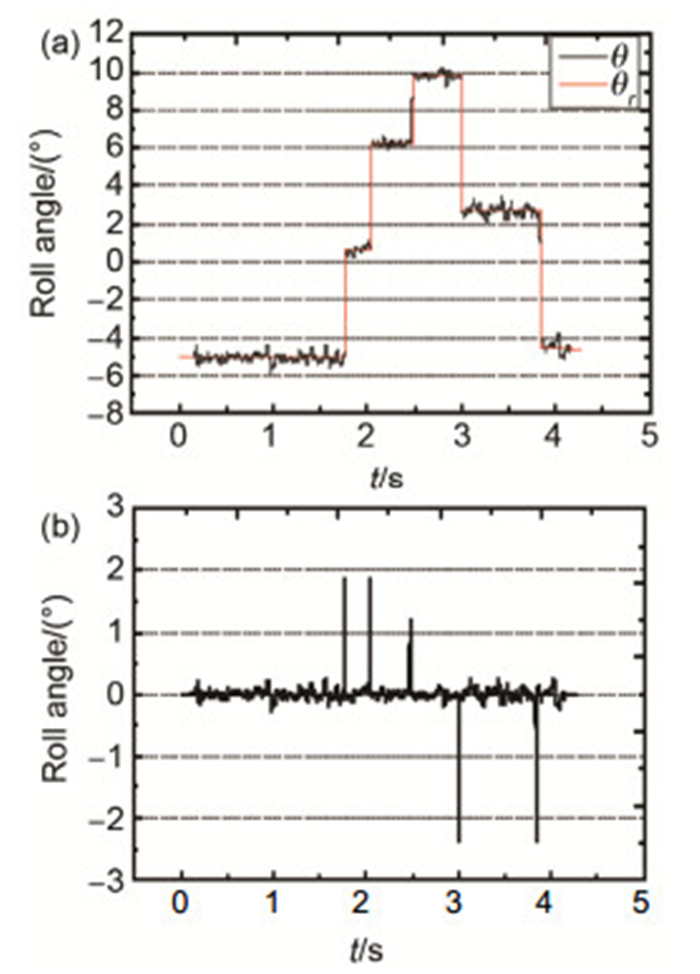
Tracking curve and tracking error of proposed method in airborne environment. (a) Position tracking curve. (b) Position tracking error.


