
 E-mail Alert
E-mail Alert RSS
RSS
-
摘要:
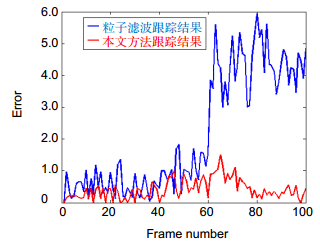
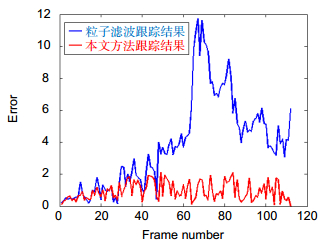
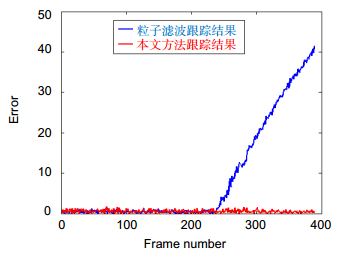
针对低信噪比(SNR < 3 dB)场景下弱小目标跟踪问题,提出了改进的粒子滤波跟踪方法。本文首先通过空间位置加权的方式来获取灰度特征,并将邻域运动模型和灰度概率图相结合来获取弱小目标运动特征,然后构建灰度与运动特性的联合观测模型来计算粒子权值。同时在跟踪过程中考虑到目标的灰度分布特性并不稳定,加入了自适应更新参考目标灰度模板的策略,最后采用几组真实场景来验证本文算法的跟踪效果。实验证明:和传统算法相比,本文算法增强了低信噪比(SNR < 3 dB)场景下红外弱小目标跟踪能力。
 Abstract:
Abstract:As to solve the problem of dim small target tracking in low signal-to-noise ratio (SNR < 3 dB) scenes, an improved particle filter tracking method is proposed. This paper firstly obtains the gray feature by spatial position weighting method, and combines the neighborhood motion model and the gray probability graph to get the motion features of dim small target. Then construct the joint observation model of gray and motion features to calculate the particle weights. At the same time, in the process of tracking, the gray distribution of the target is not stable, and the strategy of adaptively updating the gray template of reference target is added. Finally, the sequence image is used to prove the tracking effect of dim small target. Experiments show that compared with the traditional particle filter algorithm, the proposed method greatly enhanced the tracking ability of dim small target in low SNR (SNR < 3 dB) scenes.
-
Key words:
- dim and small target /
- tracking /
- particle filter /
- feature fusion
-

Overview: At present, tracking algorithms of infrared weak and small targets mainly include single-frame detection algorithm, Meanshift algorithm, Kalman filtering, extended Kalman filter, and unscented Kalman filter. Single-frame detection algorithms achieve certain detection results in a specified scenario. However, the algorithms do not make the most of the motion information of the target in different frames, with certain limitations. Meanshift algorithm is easy to lead to tracking failure under the condition of the dynamic changing background or the occluded target. The Kalman filtering algorithm is only applicable to the linear Gaussian units. Extended Kalman filter can effectively solve the target tracking problem of nonlinear systems, but it is hard to solve the filter divergence problem. Untracked Kalman filter algorithm in order to solve the filter divergence problem, but the calculation error is relatively large with the method. Because the particle filter can greatly solve the problems in the nonlinear and non-Gaussian scenes, it has been developed as a significant research direction of weak and small target tracking algorithms. However, for similar background or strong noise interference, the traditional particle filter is prone to produce tracking loss in the following two conditions: 1) The target size is small. Relying only on the gray or shape characteristics is easy to lead to unstable. 2) In low SNR < 3 dB scenarios, it is prone to produce tracking loss due to high noise interference. In order to solve the problem of tracking loss that only relying on the single feature in low signal-to-noise ratio scene, some researchers have proposed a particle tracking filtering based on multi-feature fusion.
As to solve the problem of dim small target tracking in low SNR scenes, an improved particle filter tracking method is proposed. This paper firstly obtains the gray feature by spatial position weighting method, and combines the neighborhood motion model and the gray probability graph to get the motion features of dim small target. Then construct the joint observation model of gray and motion features to calculate the particle weights. In the process of tracking, the gray distribution of the target is not stable, and the strategy of adaptively updating the gray template of reference target is added. Finally, the sequence image is used to prove the tracking effect of dim small target. Experiments show that compared with the traditional particle filter algorithm, the proposed method greatly enhanced the tracking ability of dim small target in low SNR scenes.
-

-
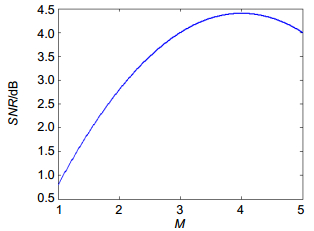
图 3 信噪比增益和累积帧长度关系示意图
Figure 3. Relationship between SNR gain and cumulative frame length
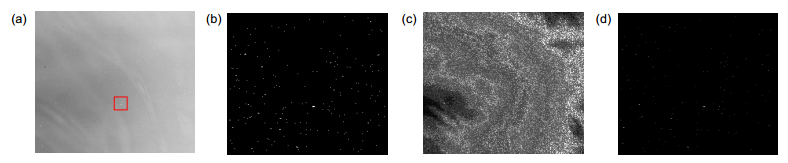
图 4 运动概率图。(a)第1帧; (b)运动模型图; (c)灰度概率图; (d)运动概率图
Figure 4. Probability distribution map of motion. (a) The 1st frame; (b) The motion model graph; (c) The gray probability graph; (d) The motion probability graph

图 5 标准粒子跟踪结果。(a)第5帧; (b)第55帧; (c)第61帧; (d)第96帧
Figure 5. Tracking results of particle filter. (a) The 5th frame; (b) The 55th frame; (c) The 61th frame; (d) The 96th frame
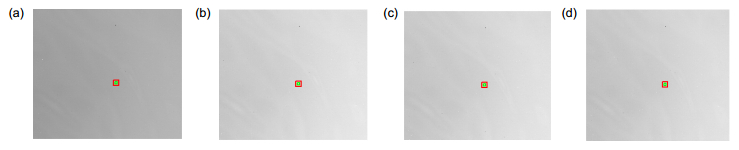
图 6 本文算法跟踪结果。(a)第5帧; (b)第55帧; (c)第61帧; (d)第96帧
Figure 6. Tracking results of the proposed method. (a) The 5th frame; (b) The 55th frame; (c) The 61th frame; (d) The 96th frame

图 8 标准粒子跟踪结果。(a)第25帧;(b)第48帧;(c)第80帧;(d)第101帧
Figure 8. Tracking results of particle filter. (a) The 25th frame; (b) The 48th frame; (c) The 80th frame; (d) The 101th frame

图 9 本文算法跟踪结果。(a)第25帧;(b)第48帧;(c)第80帧;(d)第101帧
Figure 9. Tracking results of the proposed method. (a) The 25th frame; (b) The 48th frame; (c) The 80th frame; (d) The 101th frame
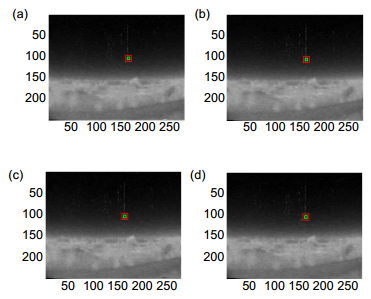
图 11 标准粒子跟踪结果。(a)第234帧;(b)第239帧;(c)第250帧;(d)第277帧
Figure 11. Tracking results of particle filter. (a) The 234th frame; (b) The 239th frame; (c) The 250th frame; (d) The 277th frame
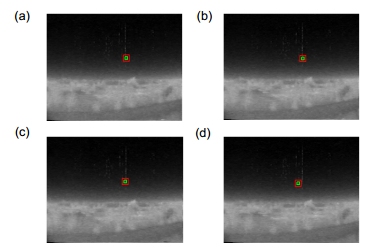
图 12 本文算法跟踪结果。(a)第234帧;(b)第239帧;(c)第250帧;(d)第277帧
Figure 12. Tracking results of the proposed method. (a) The 234th frame; (b) The 239th frame; (c) The 250th frame; (d) The 277th frame
表 1 实验序列的属性
Table 1. Properties of experimental scenes
实验序列 平均信噪比/dB 帧长度 图像大小 目标大小 序列1 1.3 100 278×246 2×2 序列2 2.0 112 279×247 2×2 序列3 1.6 389 320×240 5×5  下载: 导出CSV
下载: 导出CSV
-
[1] 苗晓孔, 王春平.改进Sobel算子的单帧红外弱小目标检测[J].光电工程, 2016, 43(12): 119-125. doi: 10.3969/j.issn.1003-501X.2016.12.019
Miao X K, Wang C P. Single frame infra-red (IR) dim small target detection based on improved sobel operator[J]. Opto-Electronics Engineering, 2016, 43(12): 119-125. doi: 10.3969/j.issn.1003-501X.2016.12.019
[2] 王鑫, 唐振民.一种新的复杂背景下红外弱小目标检测方法[J].系统仿真学报, 2009, 21(20): 6568-6572. http://www.cqvip.com/QK/97360A/201012/34132485.html
Wang X, Tang Z. New Method for Infrared Small Target Detection under Complex Background[J]. Journal of System Simulation, 2009, 21(20): 6568-6572. http://www.cqvip.com/QK/97360A/201012/34132485.html
[3] Wang X, Liu L, Tang Z M. Infrared human tracking with improved mean shift algorithm based on multicue fusion[J]. Applied Optics, 2009, 48(21): 4201-4212. doi: 10.1364/AO.48.004201
[4] 王继平, 孙华燕, 章喜.基于Kalman滤波的红外弱小目标检测前跟踪算法[J].装备学院学报, 2012, 23(2): 72-77. http://www.cqvip.com/QK/98178B/201202/41889983.html
Wang J P, Sun H Y, Zhang X. Track-before-detect algorithm for infrared dim target based on kalman filter[J]. Journal of Academy of Equipment, 2012, 23(2): 72-77. http://www.cqvip.com/QK/98178B/201202/41889983.html
[5] Zhan R H, Wan J W. Iterated unscented Kalman filter for passive target tracking[J]. IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(3): 1155-1163. doi: 10.1109/TAES.2007.4383605
[6] 康莉, 谢维信, 黄敬雄.基于unscented粒子滤波的红外弱小目标跟踪[J].系统工程与电子技术, 2007, 29(1): 1-4. http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=Y1437453
Kang L, Xie W X, Huang J X. Tracking of infrared small target based on unscented particle filtering[J]. Systems Engineering and Electronics, 2007, 29(1): 1-4. http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=Y1437453
[7] Han H, Ding Y S, Hao K R, et al. Particle filter for state estimation of jump Markov nonlinear system with application to multi-targets tracking[J]. International Journal of Systems Science, 2013, 44(7): 1333-1343. doi: 10.1080/00207721.2012.737486
[8] Han H, Ding Y S, Hao K R, et al. An evolutionary particle filter with the immune genetic algorithm for intelligent video target tracking[J]. Computers & Mathematics with Applications, 2011, 62(7): 2685-2695. http://www.sciencedirect.com/science/article/pii/S089812211100530X
[9] 种衍文, 王泽文, 陈蓉, 等.一种多特征自适应融合的粒子滤波红外目标跟踪方法[J].武汉大学学报·信息科学版, 2016, 41(5): 598-604. http://www.opticsjournal.net/abstract.htm?id=OJ1005110001783z6B9E
Chong Y W, Wang Z W, Chen R, et al. A particle filter infrared target tracking method based on multi-feature adaptive fusion[J]. Geomatics and Information Science of Wuhan University, 2016, 41(5): 598-604. http://www.opticsjournal.net/abstract.htm?id=OJ1005110001783z6B9E
[10] 王鑫, 唐振民.复杂背景下基于改进粒子滤波的红外人体跟踪[J].系统仿真学报, 2010, 22(10): 656-663. http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=Y1698692
Wang X, Tang Z. Infrared human tracking based on improved particle filter under complex background[J]. Journal of System Simulation, 2010, 22(10): 656-663. http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=Y1698692
[11] 王鑫, 唐振民.基于特征融合的粒子滤波在红外小目标跟踪中的应用[J].中国图象图形学报, 2010, 15(1): 91-97. doi: 10.11834/jig.20100115
Wang X, Tang Z. Application of particle filter based on feature fusion in small IR target tracking[J]. Journal of Image and Graphics, 2010, 15(1): 91-97. doi: 10.11834/jig.20100115
[12] Wang W G, Li C M, Shi J N. A robust infrared dim target detection method based on template filtering and saliency extraction[J]. Infrared Physics & Technology, 2015, 73: 19-28. http://dx.doi.org/10.1016/j.infrared.2015.08.015
[13] Wang X, Shen S Q, Ning C, et al. A sparse representation-based method for infrared dim target detection under sea-sky background[J]. Infrared Physics & Technology, 2015, 71: 347-355. https://www.researchgate.net/publication/277337472_A_sparse_representation-based_method_for_infrared_dim_target_detection_under_sea-sky_background
[14] Li Z Z, Chen J, Hou Q, et al. Sparse representation for infrared dim target detection via a discriminative over-complete dictionary learned online[J]. Sensors, 2014, 14(6): 9451-9470. doi: 10.3390/s140609451
[15] Wang L J, Ouyang W L, Wang X G, et al. Visual tracking with fully convolutional networks[C]// Proceedings of 2015 IEEE International Conference on Computer Vision. Santiago, Chile: IEEE, 2015.
[16] Ma C, Huang J B, Yang X K, et al. Hierarchical convolutional features for visual tracking[C]// Proceedings of 2015 IEEE International Conference on Computer Vision. Santiago, Chile: IEEE, 2015.
[17] Yang X, Sun H, Fu K, et al. Automatic ship detection in remote sensing images from google earth of complex scenes based on multiscale rotation dense feature pyramid networks[J]. Remote Sensing, 2018, 10(1): 132-139. doi: 10.3390/rs10010132
[18] 王鑫. 复杂背景下红外目标检测与跟踪算法研究[D]. 南京: 南京理工大学, 2010.
Wang X. Infrared target detection and tracking algorithms under complex background[D]. Nanjing: Nanjing University of Science and Technology, 2010.
http://cdmd.cnki.com.cn/Article/CDMD-10288-2010096366.htm [19] Fan X, Xu Z, Zhang J, et al. Dim small targets detection based on self-adaptive caliber temporal-spatial filtering[J]. Infrared Physics & Technology, 2017, 85: 465-477. http://www.sciencedirect.com/science/article/pii/S1350449517300786
[20] 张强, 蔡敬菊, 张启衡, 等.基于局部极大值的红外弱小目标分割方法[J].红外技术, 2011, 33(1): 41-44. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hwjs201101010
Zhang Q, Cai J J, Zhang Q H, et al. Small dim infrared targets segmentation method based on local maximum[J]. Infrared Technology, 2011, 33(1): 41-44. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hwjs201101010
[21] Shan C F, Wei Y C, Tan T N, et al. Real time hand tracking by combining particle filtering and mean shift[C]// Proceedings of the 6th IEEE International Conference on Automatic Face and Gesture Recognition. Seoul: IEEE, 2004.
-

 点击扫一扫
点击扫一扫
图(13)
表(1)
计量
- 文章访问数: 11016
- PDF下载数: 3051
- 施引文献: 0


