
 E-mail Alert
E-mail Alert RSS
RSS
| Citation: |

|
Extended HOG-CLBC for pedstrain detection
-
Abstract
The traditional feature fusion method based on HOG and LBP loses much spectral information, and it is more sensitive to noise. The original LBP algorithm has poor robustness to uneven illumination changes and poor rotation invariance to texture features. In order to overcome these shortcomings of the method, this paper proposes a pedestrian detection algorithm based on the feature fusion of CLBC and HOG. First, the CLBC feature of the original image is calculated, and the HOG feature based on the CLBC texture feature spectrum is calculated. The HOG feature of the original image is then calculated to extract the edge feature of the image. Then three features of the image are fused to describe the image, and after that we use principal component analysis to reduce the feature dimension. Finally, the detection of the pedestrian is realized by using the HIKSVM classifier. In this paper, experiments are carried out in Caltech pedestrian database and INRIA pedestrian database to verify the effectiveness of the proposed algorithm. The final experimental results show that the proposed algorithm improves the accuracy of pedestrian detection.-
Keywords:
- pedestrian detection /
- HOG /
- CLBC /
- feature extraction /
- feature fusion
-

-
References
[1] 苏松志, 李绍滋, 陈淑媛, 等.行人检测技术综述[J].电子学报, 2012, 40(4): 814-820. Su S Z, Li S Z, Chen S Y, et al. A survey on pedestrian detection[J]. Acta Electronica Sinica, 2012, 40(4): 814-820. [2] Benenson R, Omran M, Hosang J, et al. Ten years of pedestrian detection, what have we learned?[C]//Proceedings ofComputer Vision - ECCV 2014 Workshops, 2014: 613-627. http://www.springerlink.com/openurl.asp?id=doi:10.1007/978-3-319-16181-5_47 [3] Dollar P, Wojek C, Schiele B, et al. Pedestrian detection: an evaluation of the state of the art[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2012, 34(4): 743-761. doi: 10.1109/TPAMI.2011.155 [4] Ouyang W L, Wang X G. Joint deep learning for pedestrian detection[C]//Proceedings of IEEE International Conference on Computer Vision, 2013: 2056-2063. http://ieeexplore.ieee.org/document/6751366 [5] Zeng X Y, Ouyang W L, Wang X G. Multi-stage contextual deep learning for pedestrian detection[C]//Proceedings of IEEE International Conference on Computer Vision, 2013: 121-128. http://ieeexplore.ieee.org/xpls/icp.jsp?arnumber=6751124 [6] Luo P, Tian Y L, Wang X G, et al. Switchable deep network for pedestrian detection[C]//Proceedings of Conference on Computer Vision and Pattern Recognition, 2014: 899-906. http://doi.ieeecomputersociety.org/10.1109/CVPR.2014.120 [7] Zeng X Y, Ouyang W L, Wang M, et al. Deep learning of scene-specific classifier for pedestrian detection[C]//Fleet D, Pajdla T, Schiele B, et al. Computer Vision - ECCV 2014. Cham: Springer, 2014: 472-487. http://link.springer.com/10.1007/978-3-319-10578-9_31 [8] Dalal N, Triggs B. Histograms of oriented gradients for human detection[C]//Proceedings of IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 2005: 886-893. http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=1467360 [9] Ojala T, Pietikäinen M, Harwood I. A comparative study of texture measures with classification based on featured distributions[J]. Pattern Recognition, 1996, 29(1): 51-59. doi: 10.1016/0031-3203(95)00067-4 [10] Tribak H, Moughyt S, Zaz Y, et al. Remote QR code recognition based on HOG and SVM classifiers[C]//Proceedings of International Conference on Informatics and Computing, 2017: 137-141. http://ieeexplore.ieee.org/document/7905704/ [11] Wang X Y, Han T X, Yan S C. An HOG-LBP human detector with partial occlusion handling[C]//Proceedings of IEEE 12th International Conference on Computer Vision, 2010: 32-39. http://ci.nii.ac.jp/naid/10029956697 [12] Fan G J, Li B, Mu W Q, et al. HOGG: Gabor and hog-based human detection[C]//Proceedings of 8th International Conference on Information Technology in Medicine and Education, 2016: 562-566. http://en.cnki.com.cn/Article_en/CJFDTotal-WXJY201621005.htm [13] 彭志蓉, 赵美蓉, 杨伟明, 等.改进的多光谱聚合通道行人检测[J].光电工程, 2017, 44(9): 882-887. doi: 10.3969/j.issn.1003-501X.2017.09.004 Peng Z R, Zhao M R, Yang W M, et al. Improved multispectral aggregate channel for pedestrian detection[J]. Opto-Electronic Engineering, 2017, 44(9): 882-887. doi: 10.3969/j.issn.1003-501X.2017.09.004 [14] Zhao L H, Liu F, Wang Y J. Face recognition based on LBP and genetic algorithm[C]//Proceedings of Chinese Control and Decision Conference, 2016: 1582-1587. http://ieeexplore.ieee.org/document/7531236/ [15] Liu Y C, Huang S S, Lu C H, et al. Thermal pedestrian detection using block LBP with multi-level classifier[C]//Proceedings of International Conference on Applied System Innovation, 2017: 602-605. http://ieeexplore.ieee.org/document/7988495/ [16] Guo Z H, Zhang L, Zhang D. A completed modeling of local binary pattern operator for texture classification[J]. IEEE Transactions on Image Processing, 2010, 19(6): 1657-1663. doi: 10.1109/TIP.2010.2044957 [17] 程卫亮, 王向军, 万子敬, 等.压缩域目标跟踪算法在小型化DSP平台上的研究与实现[J].光电工程, 2017, 44(10): 972-982. doi: 10.3969/j.issn.1003-501X.2017.10.005 Cheng W L, Wang X J, Wan Z J, et al. Research and implementation of target tracking algorithm in compression domain on miniaturized DSP platform[J]. Opto-Electronic Engineering, 2017, 44(10): 972-982. doi: 10.3969/j.issn.1003-501X.2017.10.005 [18] Ji L P, Ren Y, Liu G S, et al. Training-based gradient lbp feature models for multiresolution texture classification[J]. IEEE Transactions on Cybernetics, 2017, pp(99): 1-14. [19] Zhao Y, Huang D S, Jia W. Completed local binary count for rotation invariant texture classification[J]. IEEE Transactions on Image Processing, 2012, 21(10): 4492-4497. doi: 10.1109/TIP.2012.2204271 [20] Maji S, Berg A C, Malik J. Classification using intersection kernel support vector machines is efficient[C]//Proceedings of IEEE Conference on Computer Vision and Pattern Recognition, 2008: 1-8. http://www.mendeley.com/research/classification-using-intersection-kernel-support-vectormachines-efficien/ [21] Wojek C, Schiele B. A performance evaluation of single and multi-feature people detection[C]//Proceedings of the 30th DAGM symposium on Pattern Recognition, 2008: 82-91. http://link.springer.com/chapter/10.1007/978-3-540-69321-5_9 [22] Watanabe T, Ito S. Two co-occurrence histogram features using gradient orientations and local binary patterns for pedestrian detection[C]//Proceedings of 2nd IAPR Asian Conference on Pattern Recognition, 2013: 415-419. [23] Viola P, Jones M J. Robust real-time face detection[J]. International Journal of Computer Vision, 2004, 57(2): 137-154. doi: 10.1023/B:VISI.0000013087.49260.fb -
Overview

Overview: Pedestrian detection is widely used in the field of computer vision, such as public security, intelligent robots, visual surveillance and behavior analysis and so on. However, due to the various factors like complex and changeable environment, different shooting angles, diversity of human behavior, pedestrian detection accuracy and efficiency are not high in the practical application. Therefore, the research of pedestrian detection algorithm is still an important topic in the field of computer vision. Pedestrian detection can generally be considered as the combination of feature extraction with classifier design to automatically detect an existing object from an unknown image or video. With the concept of deep learning proposed, more and more deep learning algorithms have been applied to pedestrian detection. In the pedestrian detection system, the detection mode which combines the HOG features with the LBP features and classifies them with the HIKSVM classifier has been widely used and has achieved good results. HOG features and LBP features have been widely used in feature extraction, at the same time, more and more experts and scholars are also committed to optimizing the existing features. HOG and its improved algorithm obtains good experimental results. However, due to the nature of the gradient, the HOG descriptor is quite sensitive to noise. LBP is a simple but effective operator for describing local image modes. Many of its improved operators are also proposed for extracting the texture features of an image. However, the original LBP and the improved LBP operator are ineffective in extracting the local gray-level difference information, and have the problems of poor robustness to the noise and poor rotation invariance. In order to overcome these shortcomings of the method, this paper proposes a pedestrian detection algorithm based on the feature fusion of CLBC and HOG. First, the CLBC feature of the original image is calculated, and the HOG feature based on the CLBC texture feature spectrum is calculated. The HOG feature of the original image is then calculated to extract the edge feature of the image. Then three features of the image are fused to describe the image, and after that we use principal component analysis to reduce the feature dimension. Finally the detection of the pedestrian is realized by using the HIKSVM classifier. In this paper, experiments are carried out in Caltech pedestrian database and INRIA pedestrian database to verify the effectiveness of the proposed algorithm. The final experimental results show that the proposed algorithm improves the accuracy of pedestrian detection.
-
Access History
Figures(9)
Tables(3)
Article Metrics

Export File
Citation
Format
Content
 DownLoad:
DownLoad:
-
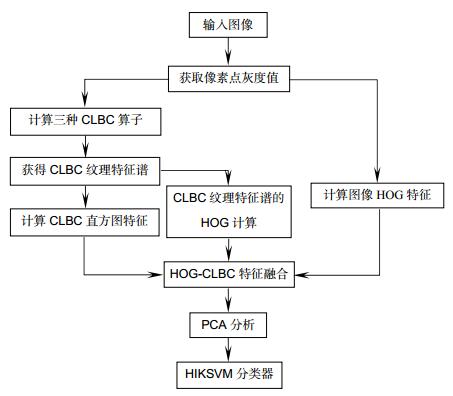
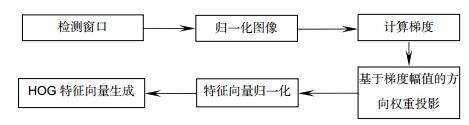
Figure 1.
Flow chart of extended HOG-CLBC for pedstrain detection
-
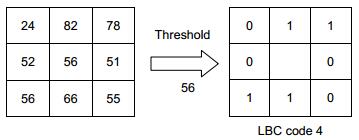
Figure 2.
LBC coding principle
-
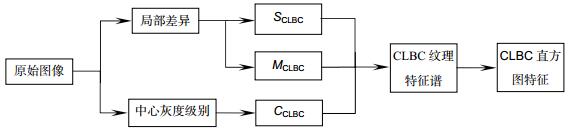
Figure 3.
CLBC feature extraction flow chart
-
Figure 4.
HOG feature generation process flow chart
-
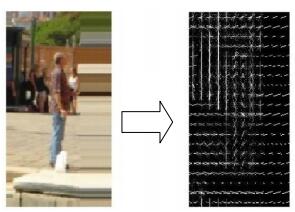
Figure 5.
HOG feature diagram of pedestrian image
-
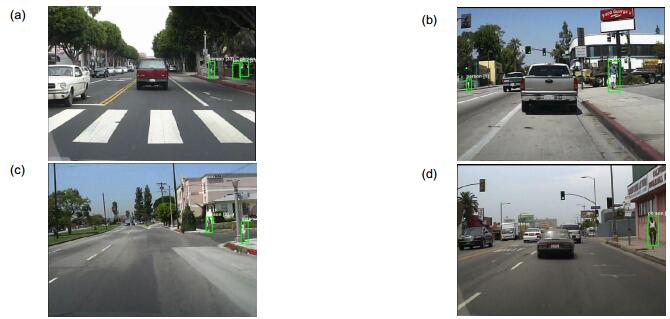
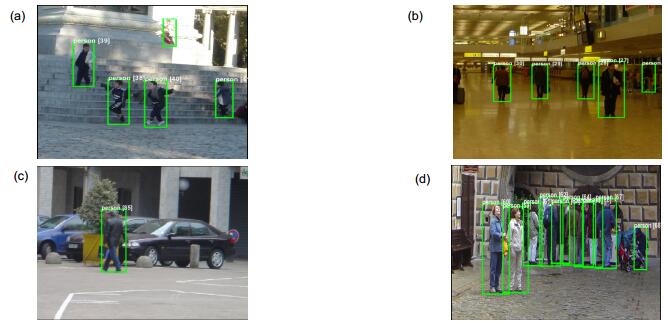
Figure 6.
Caltech pedestrian data set test results
-
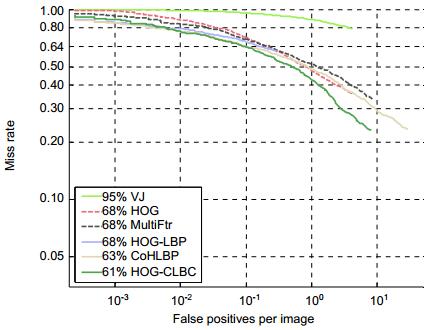
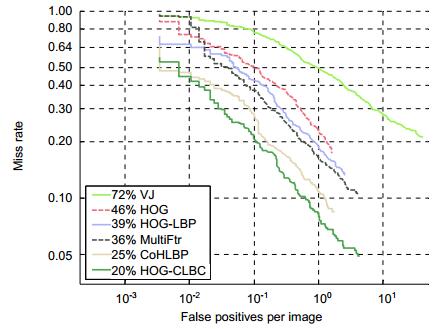
Figure 7.
Caltech pedestrian data set comparison results
-
Figure 8.
NRIA pedestrian data set test results
-
Figure 9.
INRIA Pedestrian dataset comparison results


