
 E-mail Alert
E-mail Alert RSS
RSS
| Citation: |
Wang Ke, Chen Xiaomei, Han Xu. Research on pose measurement between two non-cooperative spacecrafts in close range based on concentric circles[J]. Opto-Electronic Engineering, 2018, 45(8): 180126. doi: 10.12086/oee.2018.180126

|
Research on pose measurement between two non-cooperative spacecrafts in close range based on concentric circles
-
Abstract
Conventional measurement of relative poses between two non-cooperative spacecrafts in close range is derived from the iteration of monocular vision or three-dimensional reconstruction of binocular vision, which introduces errors in the process of feature matching, and the timeliness and accuracy are poor. Regarding the issues above, this article tries to do some researches on measurement of relative poses between two non-cooperative spacecrafts in close range based on concentric circles. Here, 'concentric circles' means the spatial parallel but not coplanar positional relationship between docking ring and engine nozzle. Through the binocular vision measurement model, the angle adaptability and the applicability are improved. Then, the algorithm of this model is simulated, and the simulated results show that the accuracy of the algorithm can reach higher than 0.5°. -

-
References
[1] 孙增玉, 高越.基于视觉技术的非合作航天器相对位姿测量方法[J].宇航计测技术, 2017, 37(4): 1-6. doi: 10.12060/j.issn.1000-7202.2017.04.01 Sun Z Y, Gao Y. Relative position and attitude measurement for non-cooperative spacecraft based on binocular vision[J]. Journal of Astronautic Metrology and Measurement, 2017, 37(4): 1-6. doi: 10.12060/j.issn.1000-7202.2017.04.01 [2] 李宜鹏, 赵春晖, 王立.基于几何特征的非合作目标相对位置和姿态估计[J].空间控制技术与应用, 2015, 41(3): 8-13. Li Y P, Zhao C H, Wang L. Relative position and attitude estimation of non-cooperative spacecraft based on geometric features[J]. Aerospace Control and Application, 2015, 41(3): 8-13. [3] Wingo D R. Orbital recovery's responsive commercial space tug for life extension missions[C]//Space 2004 Conference and Exhibit, 2004: 1-8. http://arc.aiaa.org/doi/abs/10.2514/6.2004-6118 [4] 李永飞, 王仕成, 杨东方, 等.基于单目三维重构的空间非合作目标相对测量[J].中国空间科学技术, 2016, 36(5): 48-56. Li Y F, Wang S C, Yang D F, et al. Aerial relative measurement based on monocular reconstruction for non-cooperation target[J]. Chinese Space Science and Technology, 2016, 36(5): 48-56. [5] 桂力, 郑顺义, 曹姝清, 等.基于点云的非合作航天器位姿测量方法研究[J].上海航天, 2016, 33(6): 122-128. Gui L, Zheng S Y, Cao S Q, et al. Research of pose and altitude measurement for non-cooperative spacecraft based on 3d point clouds[J]. Aerospace Shanghai, 2016, 33(6): 122-128. [6] 张磊, 徐科军, 赵锐, 等.一种基于圆特征的单目视觉位姿测量算法的改进[J].合肥工业大学学报(自然科学版), 2009, 32(11): 1669-1673. doi: 10.3969/j.issn.1003-5060.2009.11.010 Zhang L, Xu K J, Zhao R, et al. Improvement of position and orientation measurement algorithm of monocular vision based on circle features[J]. Journal of Hefei University of Technology (Natural Science), 2009, 32(11): 1669-1673. doi: 10.3969/j.issn.1003-5060.2009.11.010 [7] 魏振忠, 赵征, 张广军.空间圆姿态识别二义性的角度约束消除[J].光学精密工程, 2010, 18(3): 685-691. Wei Z Z, Zhao Z, Zhang G J. Solution of duality in pose estimation of single circle using Euclidean angular constraint[J]. Optics and Precision Engineering, 2010, 18(3): 685-691. [8] 徐文福, 梁斌, 李成, 等.空间机器人捕获非合作目标的测量与规划方法[J].机器人, 2010, 32(1): 61-69. Xu W F, Liang B, Li C, et al. Measurement and planning approach of space robot for capturing non-cooperative target[J]. Robot, 2010, 32(1): 61-69. [9] Xu W F, Xue Q, Liu H D, et al. A pose measurement method of a non-cooperative GEO spacecraft based on stereo vision[C]//Proceedings of International Conference on Control Automation Robotics & Vision, 2012: 966-971. http://ieeexplore.ieee.org/document/6485288/ [10] Sabatini M, Palmerini G B, Gasbarri P. A testbed for visual based navigation and control during space rendezvous operations[J]. Acta Astronautica, 2015, 117: 184-196. doi: 10.1016/j.actaastro.2015.07.026 [11] 张波涛, 仲朝亮, 吴秋轩.一种采用单目手眼视觉的目标位置测量方法[J].光电工程, 2018, 45(5): 170696. doi: 10.12086/oee.2018.170696 Zhang B T, Zhong C L, Wu Q X. A target localization method with monocular hand-eye vision[J]. Opto-Electronic Engineering, 2018, 45(5): 170696. doi: 10.12086/oee.2018.170696 [12] Chen Z, Huang J B. A vision-based method for the circle pose determination with a direct geometric interpretation[J]. IEEE Transactions on Robotics and Automation, 1999, 15(6): 1135-1140. doi: 10.1109/70.817678 [13] 蔡晗. 基于双目视觉的非合作目标相对测量实验研究[D]. 北京: 北京理工大学, 2015: 72-76. Cai H. Experiment research of non-cooperative space target relative measurement based on binocular vision[D]. Beijing: Beijing Institute of Technology, 2015: 72-76. http://cdmd.cnki.com.cn/Article/CDMD-10007-1015030065.htm -
Overview

Overview: With the frequent aerospace activities, the damaged and crashed spacecrafts are produced and become uncontrolled non-cooperative targets. They will take up a large number of orbital resources and threaten the safety of astronauts and other satellites. In order to ensure the space activities smoothly, the on-orbit service technology toward non-cooperative targets will become a serious problem that the space powers must face. Compared with cooperative target, the rendezvous and docking of non-cooperative target are different in close range. At this time, the service spacecraft cannot passively acquire the status information of the target spacecraft and the target spacecraft has no luminescent sign, which increases the difficulty of on-orbit service. Therefore, the interest in on-orbit servicing missions, together with the well-known challenge of approaching, has pushed the research towards techniques for non-cooperative targets. This paper attempts to do some researches on measurement of relative poses between two non-cooperative spacecrafts in close range based on concentric circles. Here, 'concentric circles' means the spatial parallel but not coplanar positional relationship between docking ring and engine nozzle. Without any artificial markings, the algorithm can solve the concentric circle size, the projected positions of the two center points, and the spatial distance between the two circular surfaces. The algorithm solves the problem by dividing the model into three different positional relationships to improve the model's angular adaptability. The algorithm can get the three-dimensional attitude angle by extending from the monocular model to the binocular model, which improves the reliability of the measurement and expands the scope of its application. Finally, simulation results show that this algorithm is feasible for super short-distance pose measurement.
-
Access History

Export File
Citation
Wang Ke, Chen Xiaomei, Han Xu. Research on pose measurement between two non-cooperative spacecrafts in close range based on concentric circles[J]. Opto-Electronic Engineering, 2018, 45(8): 180126. doi: 10.12086/oee.2018.180126
Format
Content
 DownLoad:
DownLoad:





-
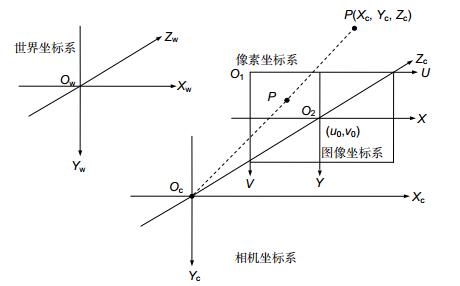
Figure 1.
The relationship among world coordinate system, camera coordinate system, image coordinate system and pixel coordinate system
-
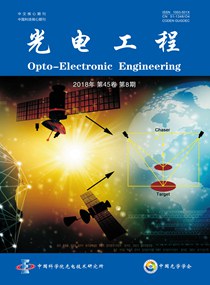
Figure 2.
The projection of the circular plane from the camera perspective
-
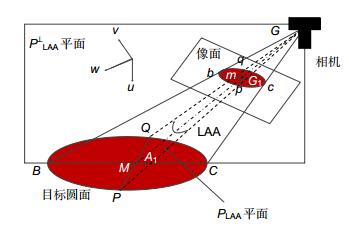
Figure 3.
The projection relationship under the new coordinate system
-
Figure 4.
Position measurement model on XZ plane
-
Figure 5.
Position measurement model on YZ plane
-
Figure 6.
The process of simulation
-
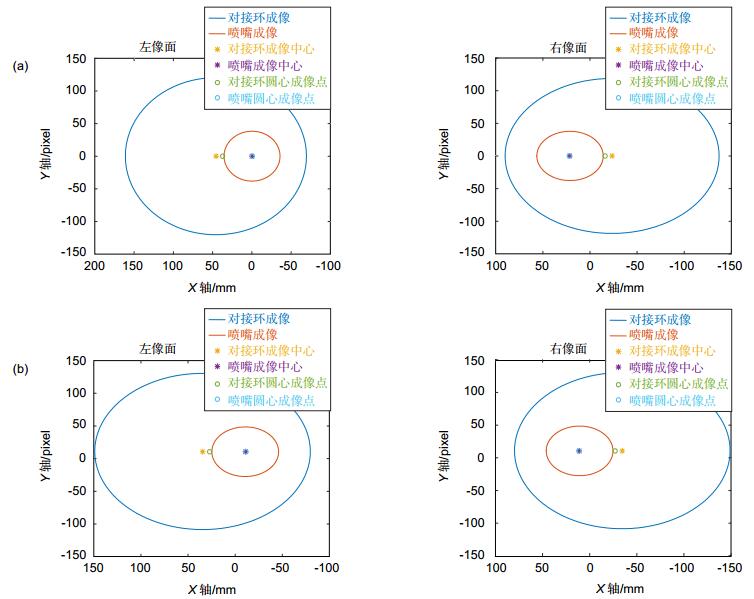
Figure 7.
The imaging diagrams of left and right image planes. (a) The target satellite rotates 1° clockwise in the XZ plane relative to the tracking satellite; (b) The target satellite rotates 1° clockwise in the YZ plane relative to the tracking satellite
-
Figure 8.
The error of the attitude angle when changing the baseline and the angle between optical axis and z axis. (a) The relationship between the error and the baseline; (b)The relationship between the error and the angle of optical axis
-
Figure 9.
The error of the attitude angle by single and binocular measurements respectively when changing the angle of X axis or Y axis. (a) The relationship between the error and the angle around Y axis; (b) The relationship between the error and the angle around X axis
-
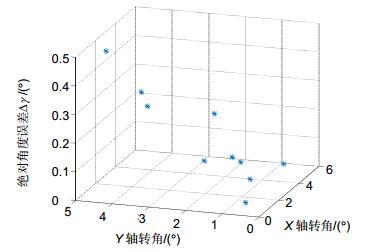
Figure 10.
The error of the attitude angle when changing the angle of X axis and Y axis


