
 E-mail Alert
E-mail Alert RSS
RSS
| Citation: |
Lu Zhaoyu, Ge Chunfeng, Wang Zhaoying, et al. Basics and developments of frequency modulation continuous wave LiDAR[J]. Opto-Electronic Engineering, 2019, 46(7): 190038. doi: 10.12086/oee.2019.190038

|
Basics and developments of frequency modulation continuous wave LiDAR
-
Abstract
Among the existing LiDAR technologies, the LiDAR with frequency modulation continuous wave (FMCW) format has the advantages of high resolution, high measurement accuracy, light weight, low power consumption compared with the conventional time-of-flight LiDAR. Benefitting from adopting continuous lightwave for measurement, the FMCW LiDAR also has unique performances such as high sensitivity, rich information, and easy processing and demodulation. It is highly competitive for high-resolution, high-accuracy detection needs, and has the potential for very good integration, miniaturization, and low energy consumption. This paper introduces the basic principles of different LiDAR systems, especially focusing on the important parameters of FMCW LiDAR, and classifies the research work of FMCW LiDAR in the past ten years into different types based on the light source scheme, and discusses the features of various schemes.-
Keywords:
- LiDAR /
- frequency modulation /
- resolution /
- coherent detection
-

-
References
[1] Swatantran A, Tang H, Barrett T, et al. Rapid, high-resolution forest structure and terrain mapping over large areas using single photon lidar[J]. Scientific Reports, 2016, 6(1): 28277. doi: 10.1038/srep28277 [2] Jaboyedoff M, Oppikofer T, Abellán A, et al. Use of LIDAR in landslide investigations: a review[J]. Natural Hazards, 2012, 61(1): 5–28. doi: 10.1007/s11069-010-9634-2 [3] Lim K, Treitz P, Wulder M, et al. LiDAR remote sensing of forest structure[J]. Progress in Physical Geography: Earth and Environment, 2003, 27(1): 88–106. doi: 10.1191/0309133303pp360ra [4] Goyer G G, Watson R. The laser and its application to meteorology[J]. Bulletin of the American Meteorological Society, 1963, 44(9): 564–570. doi: 10.1175/1520-0477-44.9.564 [5] Gschwendtner A B, Keicher W E. Development of coherent laser radar at Lincoln Laboratory[J]. Lincoln Laboratory Journal, 2000, 12(2): 383–396. [6] Pfrunder A, Borges P V K, Romero A R, et al. Real-time autonomous ground vehicle navigation in heterogeneous environments using a 3D LiDAR[C]//Proceedings of 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vancouver, BC, Canada, 2017: 2601–2608. [7] Cracknell A P, Hayes L. Introduction to Remote Sensing[M]. 2nd ed. Boca Raton: CRC Press, 2007. [8] Martin A, Dodane D, Leviandier L, et al. Photonic integrated circuit-based FMCW coherent LiDAR[J]. Journal of Lightwave Technology, 2018, 36(19): 4640–4645. doi: 10.1109/JLT.2018.2840223 [9] Zheng J. Analysis of optical frequency-modulated continuous-wave interference[J]. Applied Optics, 2004, 43(21): 4189–4198. doi: 10.1364/AO.43.004189 [10] Wolff C. Frequency-modulated continuous-wave radar (FMCW Radar)[EB/OL]. (2016-12-01) [2019-01-08]. http://demonstra-tions.wolfram.com/FrequencyModulatedContinuousWaveFMCWRadar/. [11] Bissonnette L R. Multiple-scattering lidar equation[J]. Applied Optics, 1996, 35(33): 6449–6465. doi: 10.1364/AO.35.006449 [12] Burdic W S. Radar Signal Analysis[M]. Englewood Cliffs: Prentice-Hall, 1968. [13] Lichti D D, Jamtsho S. Angular resolution of terrestrial laser scanners[J]. The Photogrammetric Record, 2006, 21(114): 141–160. doi: 10.1111/phor.2006.21.issue-114 [14] Curlander J C, McDonough R N. Synthetic Aperture Radar[M]. New York, NY, USA: John Wiley & Sons, 1991. [15] Ito F, Fan X Y, Koshikiya Y. Long-range coherent OFDR with light source phase noise compensation[J]. Journal of Lightwave Technology, 2012, 30(8): 1015–1024. doi: 10.1109/JLT.2011.2167598 [16] Bashkansky M, Lucke R L, Funk E, et al. Two-dimensional synthetic aperture imaging in the optical domain[J]. Optics Letters, 2002, 27(22): 1983–1985. doi: 10.1364/OL.27.001983 [17] Skolnik M I. Radar Handbook[M]. New York NY, USA: McGraw-Hill, 1970. [18] Buell W, Marechal N, Buck J, et al. Demonstration of synthetic aperture imaging ladar[J]. Proceedings of SPIE, 2005, 5791: 152–166. doi: 10.1117/12.609682 [19] Beck S M, Buck J R, Buell W F, et al. Synthetic-aperture imaging laser radar: laboratory demonstration and signal processing[J]. Applied Optics, 2005, 44(35): 7621–7629. doi: 10.1364/AO.44.007621 [20] Satyan N, Vasilyev A, Rakuljic G, et al. Precise control of broadband frequency chirps using optoelectronic feedback[J]. Optics Express, 2009, 17(18): 15991–15999. doi: 10.1364/OE.17.015991 [21] Satyan N, Vasilyev A, Rakuljic G, et al. Phase-locking and coherent power combining of broadband linearly chirped optical waves[J]. Optics Express, 2012, 20(23): 25213–25227. doi: 10.1364/OE.20.025213 [22] DiLazaro T, Nehmetallah G. Large-volume, low-cost, high-precision FMCW tomography using stitched DFBs[J]. Optics Express, 2018, 26(3): 2891–2904. doi: 10.1364/OE.26.002891 [23] DiLazaro T, Nehmetallah G. Large depth high-precision FMCW tomography using a distributed feedback laser array[J].Proceedings of SPIE, 2018, 10539: 1053906. [24] Behroozpour B, Sandborn P A M, Quack N, et al. 11.8 Chip-scale electro-optical 3D FMCW lidar with 8μm ranging precision[C]//Proceedings of 2016 IEEE International Solid-State Circuits Conference, San Francisco, CA, USA, 2016: 214–216. [25] Poulton C V, Yaacobi A, Cole D B, et al. Coherent solid-state LIDAR with silicon photonic optical phased arrays[J]. Optics Letters, 2017, 42(20): 4091–4094. doi: 10.1364/OL.42.004091 [26] Roos P A, Reibel R R, Berg T, et al. Ultrabroadband optical chirp linearization for precision metrology applications[J]. Optics Letters, 2009, 34(23): 3692–3694. doi: 10.1364/OL.34.003692 [27] Crouch S, Barber Z W. Laboratory demonstrations of interferometric and spotlight synthetic aperture ladar techniques[J]. Optics Express, 2012, 20(22): 24237–24246. doi: 10.1364/OE.20.024237 [28] Carrara W, Majewski R M, Goodman R S. Spotlight Synthetic Aperture Radar: Signal Processing Algorithms[M]. Boston: Artech House, 1995. [29] Jakowatz Jr C V, Wahl D E, Eichel P H, et al. Spotlight-Mode Synthetic Aperture Radar: A Signal Processing Approach[M]. Boston, MA, USA: Springer, 1996. [30] Wahl D E, Eichel P H, Ghiglia D C, et al. Phase gradient autofocus-a robust tool for high resolution SAR phase correction[J]. IEEE Transactions on Aerospace and Electronic Systems, 1994, 30(3): 827–835. doi: 10.1109/7.303752 [31] Yocky D, Wahl D, Jakowatz Jr C. Spotlight-mode SAR image formation utilizing the chirp Z-transform in two dimensions[C]//Proceedings of 2006 IEEE International Symposium on Geoscience and Remote Sensing, Denver, CO, USA, 2006: 4180–4182. [32] Pierrottet D, Amzajerdian F, Petway L, et al. Linear FMCW laser radar for precision range and vector velocity measurements[J]. MRS Online Proceedings Library Archive, 2008, 1076: 1076–K04–06. doi: 10.1557/PROC-1076-K04-06 [33] Wang N, Wang R, Mo D, et al. Inverse synthetic aperture LADAR demonstration: system structure, imaging processing, and experiment result[J]. Applied Optics, 2018, 57(2): 230–236. doi: 10.1364/AO.57.000230 [34] Lyu Y K, Yang T X, Lu Z Y, et al. External modulation method for generating accurate linear optical FMCW[J]. IEEE Photonics Technology Letters, 2017, 29(18): 1560–1563. doi: 10.1109/LPT.2017.2736561 [35] Li G Z, Wang R, Song Z Q, et al. Linear frequency-modulated continuous-wave ladar system for synthetic aperture imaging[J]. Applied Optics, 2017, 56(12): 3257–3262. doi: 10.1364/AO.56.003257 [36] Chen V C, Ling H. Time-frequency Transforms for Radar Imaging and Signal Analysis[M]. Boston, MA, USA: Artech House, 2002. [37] Shimizu K, Horiguchi T, Koyamada Y. Technique for translating light-wave frequency by using an optical ring circuit containing a frequency shifter[J]. Optics Letters, 1992, 17(18): 1307–1309. doi: 10.1364/OL.17.001307 [38] Lu Z Y, Yang T X, Li Z Y, et al. Broadband linearly chirped light source with narrow linewidth based on external modulation[J]. Optics Letters, 2018, 43(17): 4144–4147. doi: 10.1364/OL.43.004144 [39] Yariv A, Yeh P. Photonics: Optical Electronics in Modern Communications[M]. 6th ed. New York, NY, USA: Oxford University Press, 2006. -
Overview

Overview: LiDAR (Laser detection and ranging) is an active remote sensing technology that uses laser for imaging, detecting and ranging. It has the advantages of high resolution, high precision, light weight and strong anti-interference. Following the invention of the laser in 1960, Radar's working bands and techniques were quickly convert by researchers from the microwave band to the optical band. Compared with the traditional microwave radar technology, the LiDAR works in a shorter wavelength band, which makes the laser beam can achieve smaller divergence angle and better directionality. As LiDAR working in the optical band, the distance resolution and angular resolution that can be achieved during detection are greatly improved. LiDAR detection can obtain complex information such as target distance, velocity, reflectivity, etc. The acquired 3D point cloud data is usually used to generate high-resolution 3D maps or 3D models, and is widely used in surveying, topography, forestry, areas of atmospheric physics, laser guidance, aerospace, deep space exploration and unmanned driving.
At present, the detection mechanism of LiDAR is mainly divided into two types, non-coherent detection and coherent detection. Non-coherent detection is also called direct detection since it directly detects the change of the amplitude of the reflected light signal. It is widely used in time-of-flight (TOF) LiDAR or amplitude-modulated continuous-wave LiDAR. Coherent detection uses heterodyne detection to detect by measuring the frequency or phase difference between the echo signal and the local oscillator signal. The current mainstream coherent detection LiDARs include frequency modulated continuous wave (FMCW) LiDAR and Doppler speed LiDAR. The heterodyne detection method has higher sensitivity than the direct detection method, which makes the coherent detection type LiDAR can work at a lower transmission power.
In view of the advantages of LiDAR, especially the coherent detection FMCW LiDAR, this paper will introduce the basic working principle of FMCW LiDAR and the recent developments. The second part introduces the working principle of FMCW LiDAR and the relationship between the basic performance of FMCW LiDAR and the parameters of the transmitting system. The third part and the fourth part introduce the generation of FMCW light by different modulation methods in the past decade and discuss the characteristics of various schemes. Methods and experiments of cavity tuning, current injection tuning and external modulation are briefly present in these two parts as well as the technique and algorithm of synthesis aperture. Finally, we compared and summarized the FMCW LiDAR systems mentioned in this review.
-
Access History
Figures(12)
Tables(1)
Article Metrics

Export File
Citation
Lu Zhaoyu, Ge Chunfeng, Wang Zhaoying, et al. Basics and developments of frequency modulation continuous wave LiDAR[J]. Opto-Electronic Engineering, 2019, 46(7): 190038. doi: 10.12086/oee.2019.190038
Format
Content
 DownLoad:
DownLoad:

-
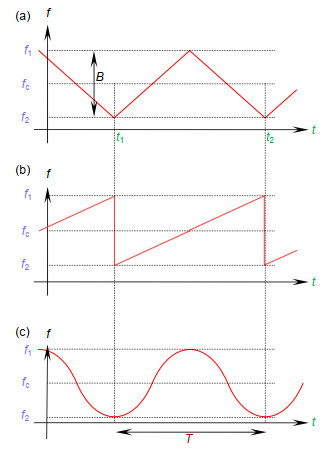
Figure 1.
Frequency modulation pattern of the FMCW lidar source, representing the relationship between the frequency of optical carrier wave and the time. (a) Time frequency relationship of FMCW with the triangular modulation; (b) Time frequency relationship of FMCW with the sawtooth modulation; (c) Time frequency relationship of FMCW with the sine modulation
-
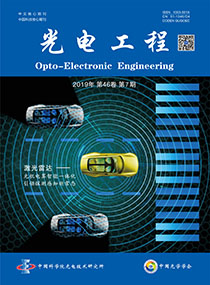
Figure 2.
(a) Time frequency domain diagram of transmitted signal and received echo signal under the trianglar modulation; (b) Time frequency domain diagram of the beat signal after coherent detection; (c) Time domain waveform of the received beat signal[10]
-
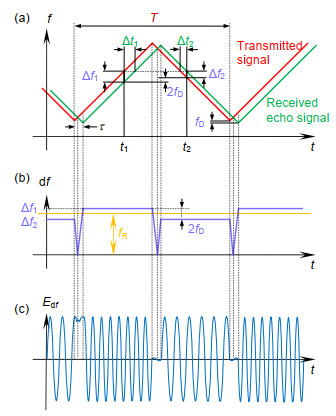
Figure 3.
(a) Experimental setup; (b) Target constructed from the letters NRL cut out from reflective tape and mounted upon a scratched aluminum plate; (c) SAIL-processed image of the sample[16]
-
Figure 4.
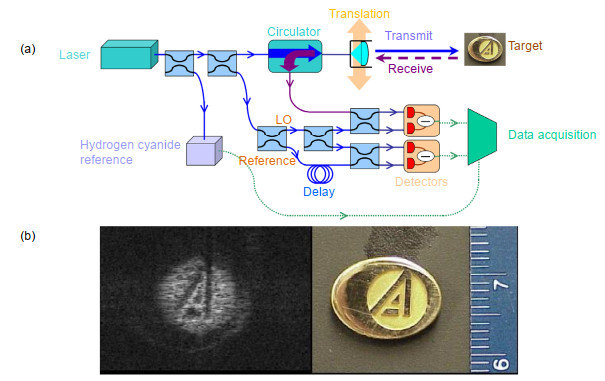
(a) Component layout for the fiber-based SAIL system. The synthetic aperture is created by using a translation stage to scan the aperture across the target; (b) SAIL image of a tie tack with a "circle A" [18]
-
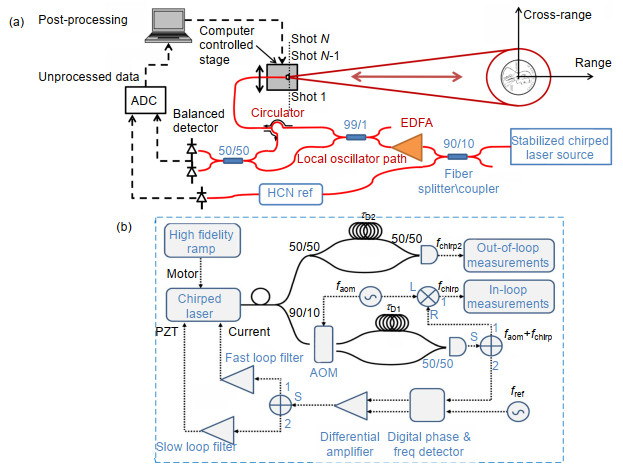
Figure 5.
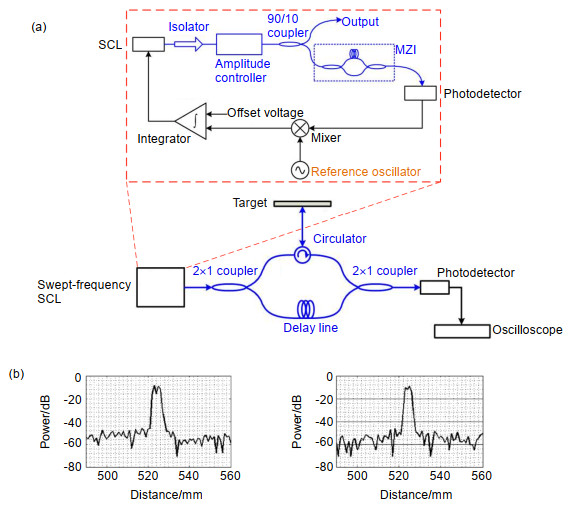
(a) Schematic of the ranging experiment with a linearly chirped optical source based on optoelectronic feedback loop; (b) Range resolution measurements using the swept-frequency SCL. The target was an acrylic sheet of refractive index 1.5 and thickness 2.25 mm and 1.49 mm[20]
-
Figure 6.
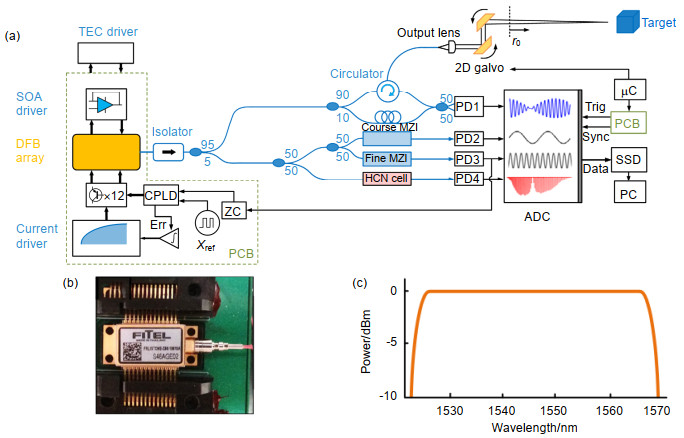
(a) Scanning system layout, ISO: Optical isolator, MZI: Mach-Zehnder interferometers, CPLD: complex programmable logic device, µC: Teensy microcontroller, SSD: solid-state hard drive; (b) DFB array module; (c) Normalized output power over all elements[22]
-
Figure 7.
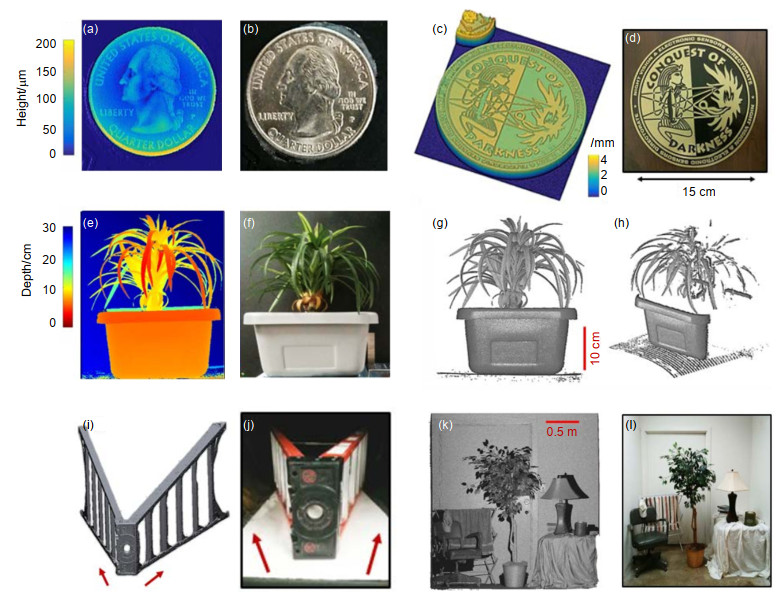
3D images over depths ranging from less than a millimeter to meters. (a) Surface map of a (b) quarter at 25 cm (400 pixels×420 pixels); (c) Surface map of a (d) 15 cm diameter medallion at 1.1 m (700 pixels×740 pixels); (e) Volume depth map of a (f) potted plant placed at 2.5 m (408 pixels×490 pixels). Volume shown = 33.5l cm×30d cm×40h cm; (g) Reflectivity profile of the plant with a (h) rotated view; (i) 3D mesh of a (j) six-foot ladder starting at 2.5 m (408 pixels×370 pixels); (k) 3D point cloud of a (l) room with a variety of objects (884 pixels×900 pixels)[22].
-
Figure 8.
(a) Schematic of experimental setup illustrating basic stripmap mode SAL system[27]; (b) Experimental setup for broadband optical frequency chirp linearization using the self-heterodyne technique[26]
-
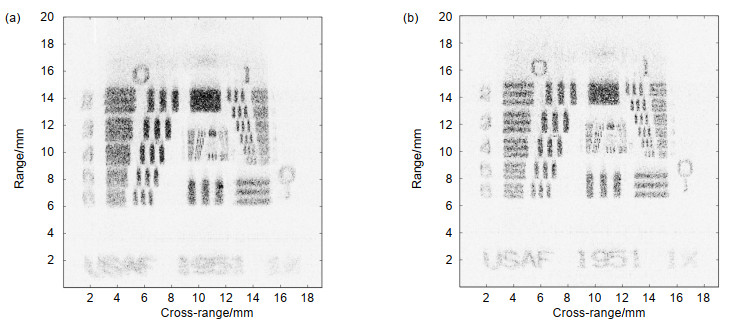
Figure 9.
(a) Spotlight SAL image of USAF 1951 resolution target; (b) Same SAL image with PGA applied in crossrange and range after CZT-PF processing[27]
-
Figure 10.
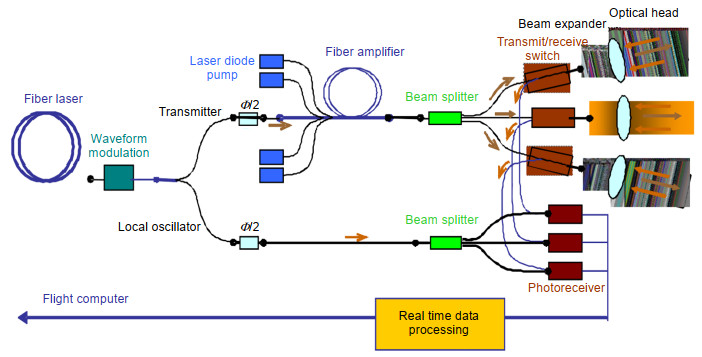
All fiber, coherent Doppler LiDAR system schematic[32]
-
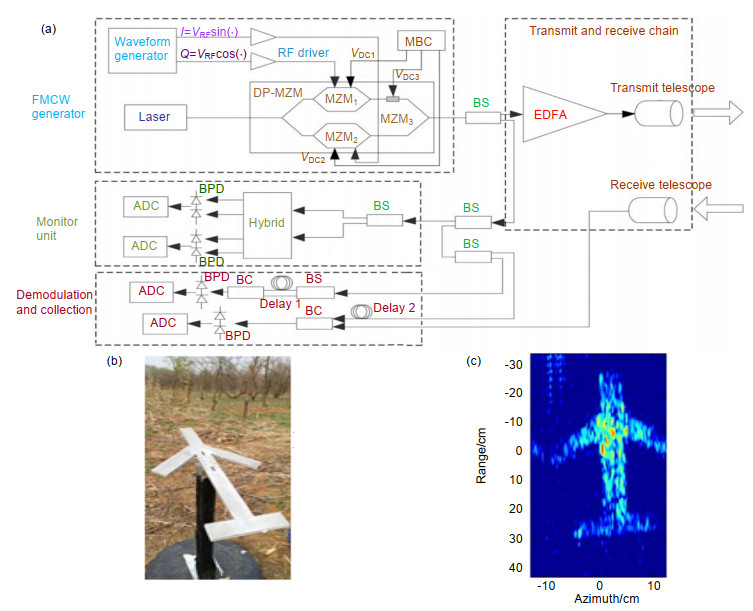
Figure 11.
(a) Block diagram of the proposed linear FMCW LiDAR system; (b) Optical photo of the airplane model; (c) Azimuth multilook result based on the JTFT method[33]
-
Figure 12.
(a) Schematic for the generation of the chirped light; (b), (c), (d) Time-intensity evolution diagrams of the pulse sequence for A, B, C; (e), (f) Time-frequency evolution diagrams of the pulse sequence for B, C [38]


