
 E-mail Alert
E-mail Alert RSS
RSS
| Citation: |
Hu Yihua, Dong Xiao, Zhao Nanxiang. Research on coherent differential absorption LiDAR based on Golay coding technology[J]. Opto-Electronic Engineering, 2019, 46(7): 19081-. doi: 10.12086/oee.2019.190081

|
Research on coherent differential absorption LiDAR based on Golay coding technology
-
Abstract
The detection of CO2 based on coherent different absorption LiDAR (CDIAL) requires high signal-to-noise ratio (SNR). To improve the SNR and reduce the inversion error of CO2, a coherent differential absorption LiDAR based on Golay coding is proposed and the corresponding decoding method is also studied. The coding gain of SNR in traditional atmospheric backscattering signal detection is also analyzed when the pulse code technology is used. The variations of coding gain with the power of local oscillator (LO), the code length and the splitting ratio of 3 dB coupler are discussed. The higher the local oscillator power is and the more the beam splitting ratio deviates from 50%, the lower the coding gains. In addition, there are optimal code lengths in practical systems. The influence of thermal noise on the detection system decreases when the LO power grows, and there is optimal LO power which is only related to the system noise characteristics. The optimal LO power decreases with respect to single pulse detection after pulse coding, but the SNR is still higher than the traditional single pulse detection. When the splitting ratio of the 3 dB coupler is 0.495, the optimal LO power in coded system is 0.93 mW. The effective detection ranges of CO2 increase when the pulses are coded, and in the pulse accumulations of 104~1010, the improvement ratios of effective detection range are higher than 15%.-
Keywords:
- coherent LiDAR /
- differential LiDAR /
- Golay coding /
- coding gain
-

-
References
[1] Ishii S, Koyama M, Baron P, et al. Ground-based integrated path coherent differential absorption lidar measurement of CO2: foothill target return[J]. Atmospheric Measurement Techniques, 2013, 6(5): 1359-1369. doi: 10.5194/amt-6-1359-2013 [2] Ishii S, Mizutani K, Fukuoka H, et al. Coherent 2μm differential absorption and wind lidar with conductively cooled laser and two-axis scanning device[J]. Applied Optics, 2010, 49(10): 1809-1817. doi: 10.1364/AO.49.001809 [3] Gibert F, Edouart D, Cénac C, et al. 2-μm Ho emitter-based coherent DIAL for CO2 profiling in the atmosphere[J]. Optics Letters, 2015, 40(13): 3093-3096. doi: 10.1364/OL.40.003093 [4] Wu S H, Liu B Y, Liu J T, et al. Wind turbine wake visualization and characteristics analysis by Doppler lidar[J]. Optics Express, 2016, 24(10): A762-A780. doi: 10.1364/OE.24.00A762 [5] Wang C, Xia H Y, Liu Y P, et al. Spatial resolution enhancement of coherent Doppler wind lidar using joint time-frequency analysis[J]. Optics Communications, 2018, 424: 48-53. doi: 10.1016/j.optcom.2018.04.042 [6] Belmonte A. Analyzing the efficiency of a practical heterodyne lidar in the turbulent atmosphere: telescope parameters[J]. Optics Express, 2003, 11(17): 2041-2046. doi: 10.1364/OE.11.002041 [7] Hu Y H, Dong X, Zhao N X, et al. System efficiency of heterodyne lidar with truncated Gaussian Schell-Model beam in turbulent atmosphere[J]. Optics Communications, 2019, 436: 82-89. doi: 10.1016/j.optcom.2018.12.008 [8] Muanenda Y S, Taki M, Nannipieri T, et al. Advanced coding techniques for long-range raman/BOTDA distributed strain and temperature measurements[J]. Journal of Lightwave Technology, 2016, 34(2): 342-350. doi: 10.1109/JLT.2015.2493438 [9] Wang F, Zhu C H, Cao C Q, et al. Enhancing the performance of BOTDR based on the combination of FFT technique and complementary coding[J]. Optics Express, 2017, 25(4): 3504-3513. doi: 10.1364/OE.25.003504 [10] Nazarathy M, Newton S A, GIFFARD R P, et al. Real-time long range complementary correlation optical time domain reflectometer[J]. Journal of Lightwave Technology, 1989, 7(1): 24-38. doi: 10.1109/50.17729 [11] 周艳宗, 王冲, 魏天问, 等.基于Golay脉冲编码技术的相干激光雷达仿真研究[J].中国激光, 2018, 45(8): 810004. Zhou Y Z, Wang C, Wei T W, et al. Simulation research of coherent lidar based on golay coding technology[J]. Chinese Journal of Lasers, 2018, 45(8): 0810004. [12] 杜晓林, 苏涛, 王旭, 等.基于Golay互补序列空时编码的MIMO雷达波形设计[J].电子与信息学报, 2014, 36(8): 1966-1971. Du X L, Su T, Wang X, et al. Golay complementary sequence with space time coding for MIMO radar waveform design[J]. Journal of Electronics & Information Technology, 2014, 36(8): 1966-1971. [13] Pezeshki A, Calderbank R A, Moran W, et al. Doppler resilient golay complementary waveforms[J]. IEEE Transactions on Information Theory, 2008, 54(9): 4254-4266. doi: 10.1109/TIT.2008.928292 [14] Hu Y H, Dong X, Guo L R. Coherent detection of backscattered polarized laser with polarization diversity reception[C]//Proceedings of the 4th International Conference on Ubiquitous Positioning, Indoor Navigation and Location Based Services, Shanghai, 2016: 271-277. https://www.researchgate.net/publication/312184310_Coherent_detection_of_backscattered_polarized_laser_with_polarization_diversity_reception [15] 李永倩, 王文平, 李晓娟, 等. APD检测Golay编码BOTDR系统的建模分析与优化设计[J].红外与激光工程, 2017, 46(11): 1122002. Li Y Q, Wang W P, Li X J, et al. Modeling analysis and optimization design of a Golay coding Brillouin Optical Time Domain Reflectometer system with APD detector[J]. Infrared and Laser Engineering, 2017, 46(11): 1122002. [16] 杨彦玲, 李彦超, 高龙, 等.相干激光雷达平衡外差探测方法的数值仿真[J].红外与激光工程, 2011, 40(10): 1918-1922. doi: 10.3969/j.issn.1007-2276.2011.10.018 Yang Y L, Li Y C, Gao L, et al. Numerical simulation of balanced heterodyne detection for coherent lidar[J]. Infrared and Laser Engineering, 2011, 40(10): 1918-1922. doi: 10.3969/j.issn.1007-2276.2011.10.018 [17] Holmes J F, Rask B J. Optimum optical local oscillator power levels in coherent detection systems[J]. Proceedings of SPIE, 1993, 1982: 157-63. doi: 10.1117/12.142009 [18] Frehlich R G, Kavaya M J. Coherent laser radar performance for general atmospheric refractive turbulence[J]. Applied Optics, 1991, 30(36): 5325-5352. doi: 10.1364/AO.30.005325 [19] Ren Y X, Dang A H, Liu L, et al. Heterodyne efficiency of a coherent free-space optical communication model through atmospheric turbulence[J]. Applied Optics, 2012, 51(30): 7246-7254. doi: 10.1364/AO.51.007246 [20] Dong X, Hu Y, Zhao N, et al. Numerical analysis of linewidth demands in heterodyne lidar[C]//Proceedings of the Advanced Sensor Systems and Applications VIII, Beijing, 2018: 1082113. [21] Hu Y H, Dong X, Zhao N X, et al. Fast retrieval of atmospheric CO2 concentration based on a near-infrared all-fiber integrated path coherent differential absorption lidar[J]. Infrared Physics & Technology, 2018, 92: 429-435. -
Overview

Overview: The differential absorption LiDAR (DIAL) can obtain the spatio-temporal distribution information of atmospheric CO2, which needs high signal-to-noise ratio (SNR). To improve the detection SNR, the coherent detection and heterodyne detection are widely used and have been combined with DIAL due to the excellent noise-reducing ability. In this paper, we propose a coherent differential absorption LiDAR (CDIAL) based on Golay coding to further reduce the detection errors, and the decoding method is also analyzed. The coding gain formula of SNR due to Golay coding is deduced, which is related to the local oscillator (LO) power, the code length, the splitting ratio of the 3 dB coupler. When the LO power is lower, the thermal noise should not be neglected, and the coding gain is higher, which is mainly due to the suppression of thermal noise. The higher the local oscillator power is and the more the beam splitting ratio deviates from 50%, the lower the coding gains are, because these two factors can improve the shot noise and the relative intensity noise, and thus the influence of thermal noise decreases. In addition, there are optimal code lengths in actual heterodyne detection systems, when the code length is higher than the optimal code length, the increase of coding gain is not obvious. The influence of thermal noise on the detection system decreases when the LO power grows, and there are optimal LO power which is only related to the system noise characteristics. The optimal LO power decreases with respect to single pulse detection after pulse coding, but the SNR is still higher than the traditional single pulse detection. When the splitting ratio of the 3 dB coupler is 0.495, the optimal LO power in coded system is 0.93 mW, and the maximum SNR in traditional pulse LiDARs is 73.27% of that in coded pulse LiDARs. When the splitting ratio is 0.49, the optimal LO power can be further lower. To analyze the improvement of CDIAL performance when the Golay coding is used, we calculate the detection error of CDIAL under different LO power. Two operation mode of CDIAL system are considered, including the collimated mode and the focused mode. The focused mode has better performance in short range detection duo to its relatively higher system efficiency. The detection accuracy of CO2 should be better than 4 ppm, and we define the range corresponding the error of 4 ppm as the effective range. And the effective range is longer with the coded pulses. In the pulse accumulations of 104~1010, the improvement ratios of effective detection range are higher than 15%. In addition, the Golay coding technology can both improve the SNR and the spatial resolution of LiDARs, which will be discussed in the future research.
-
Access History

Export File
Citation
Hu Yihua, Dong Xiao, Zhao Nanxiang. Research on coherent differential absorption LiDAR based on Golay coding technology[J]. Opto-Electronic Engineering, 2019, 46(7): 19081-. doi: 10.12086/oee.2019.190081
Format
Content
 DownLoad:
DownLoad:

-
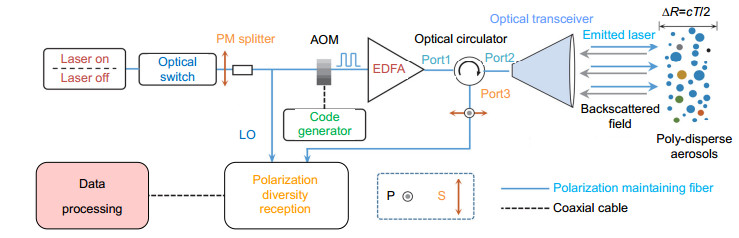
Figure 1.
Schematic diagram of coherent differential absorption LiDAR based on Golay coding
-
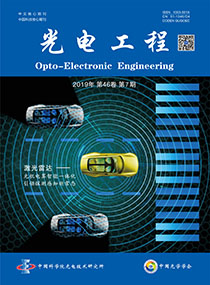
Figure 2.
Decoding flow chart of Golay code
-
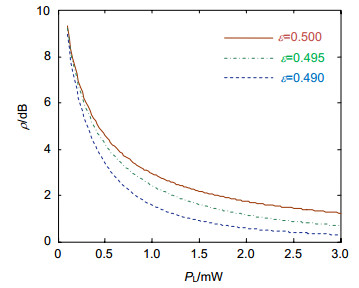
Figure 3.
Relationship between the coding gain and the power of LO
-
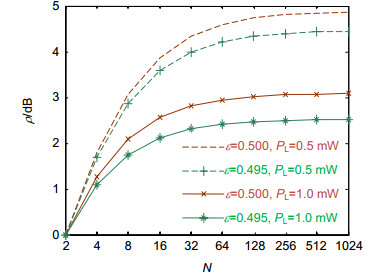
Figure 4.
The change of coding gain with the code length
-
Figure 5.
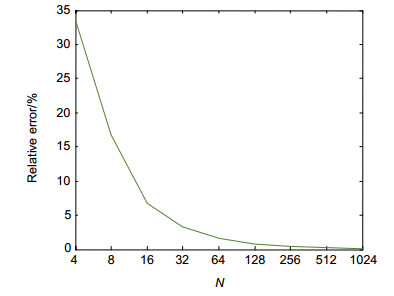
Relative decoding errors of Golay code with a fixed power EDFA
-
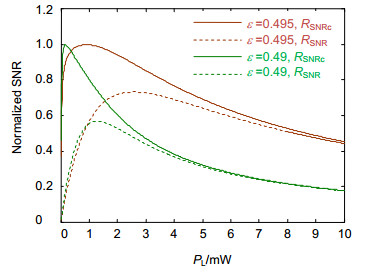
Figure 6.
Normalized SNR based on Golay coding
-
Figure 7.
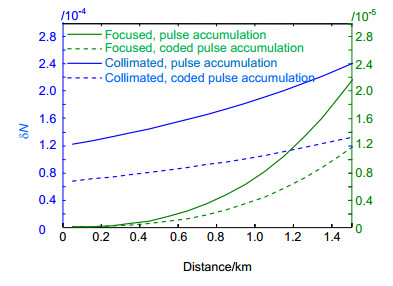
The variation of CO2 concentration error with detection range
-
Figure 8.
The influence of Golay coding on effective detection range


