
 E-mail Alert
E-mail Alert RSS
RSS
| Citation: |
Xiang Yi, Wang Yi, Zhang Jiachen, et al. Target location estimation for vehicle dual radar based on unscented Kalman filter[J]. Opto-Electronic Engineering, 2019, 46(7): 180339. doi: 10.12086/oee.2019.180339

|
Target location estimation for vehicle dual radar based on unscented Kalman filter
-
Abstract
In the research of unmanned vehicle, the state estimation of target detected by sensors is one of the key issues in environmental sensing technology. In this paper, an algorithm based on unscented Kalman filter is proposed to predict and update the position of the target based on the obtained radar data, which is used to estimate the target position of the unmanned vehicle dual radar system. The vehicle radar system in this paper is composed of four lines laser and millimeter wave radar. The calibrated vehicle coordinate system is a two-dimensional coordinate system parallel to the ground. On the basis of the system and coordinate system, the real radar data are collected and simulated in the experimental site. Experiments show that compared with single sensor, the measurement error of radar combination model is effectively reduced, and the accuracy of fusion data is improved. Compared with the most commonly used extended Kalman filtering algorithm, the mean square error of the moving direction of vehicle descends from 6.15 per thousand to 4.83 per thousand. The mean square error value of the average position decreases from 4.24 per thousand to 2.99 per thousand in the direction parallel to the front axle, which indicates that the estimation of the target position of this algorithm is more accurate and closer to the real value. In addition, in the same operating environment, the average time of processing 500 groups of radar data is reduced from 5.9 ms to 2.1 ms, proving that the algorithm has a higher algorithm efficiency.-
Keywords:
- LiDAR /
- millimeter wave radar /
- Kalman filter /
- position estimation
-

-
References
[1] 杨帆.无人驾驶汽车的发展现状和展望[J].上海汽车, 2014(3): 35-40. Yang F. The current status and future prospect of driverless vehicles[J]. Shanghai auto, 2014(3): 35-40. [2] 王军, 苏剑波, 席裕庚.多传感器融合综述[J].数据采集与处理, 2004, 19(1): 72-77. doi: 10.3969/j.issn.1004-9037.2004.01.015 Wang J, Su J B, Xi Y G. Summary of multisensor fusion[J]. Journal of Data Acquisition & Processing, 2004, 19(1): 72-77. doi: 10.3969/j.issn.1004-9037.2004.01.015 [3] 高振海, 王竣, 佟静, 等.车载毫米波雷达对前方目标的运动状态估计[J].吉林大学学报(工学版), 2014, 44(6): 1537-1544. Gao Z H, Wang J, Tong J, et al. Target motion state estimation for vehicle-borne millimeter-wave radar[J]. Journal of Jilin University (Engineering and Technology Edition), 2014, 44(6): 1537-1544. [4] 孙勇, 景博.基于支持度的多传感器一致可靠性融合[J].传感技术学报, 2005, 18(3): 537-539. doi: 10.3969/j.issn.1004-1699.2005.03.025 Sun Y, Jing B. Consistent and reliable fusion of multi-sensor based on support degree[J]. Chinese Journal of Sensors and Actuators, 2005, 18(3): 537-539. doi: 10.3969/j.issn.1004-1699.2005.03.025 [5] 赵万里.基于雷达的智能车多目标检测与跟踪技术研究[D].长沙: 中南大学, 2011. Zhao W L. Technology research of the multi-objective detection and tracking for intelligent vehicle based on radars[D]. Changsha: Central South University, 2011. [6] 夏志伟, 李琦, 王骐.基于卡尔曼滤波的相干激光雷达距离像复原仿真[J].激光与光电子学进展, 2011, 48(5): 051002. Xia Z W, Li Q, Wang Q. Simulation of coherent lidar range image restoration based on kalman filtering[J]. Laser & Optoelectronics Progress, 2011, 48(5): 051002. [7] 黄喆, 杨凌辉, 赵子越, 等.基于扩展卡尔曼滤波的光电扫描动态坐标测量算法研究[J].激光与光电子学进展, 2016, 53(5): 51201. Huang Z, Yang L H, Zhao Z Y, et al. Research on optoelectronic scanning dynamic coordinate measurement algorithm based on extended kalman filter[J]. Laser & Optoelectronics Progress, 2016, 53(5): 51201. [8] 宁倩慧, 张艳兵, 刘莉, 等.扩展卡尔曼滤波的目标跟踪优化算法[J].探测与控制学报, 2016, 38(1): 90-94. Ning Q H, Zhang Y B, Liu L, et al. Optimization algorithm for target tracking based on extended Kalman filtering[J]. Journal of Detection & Control, 2016, 38(1): 90-94. [9] Xie G T, Gao H B, Qian L J, et al. Vehicle trajectory prediction by integrating physics- and maneuver-based approaches using interactive multiple models[J]. IEEE Transactions on Industrial Electronics, 2018, 65(7): 5999-6008. doi: 10.1109/TIE.2017.2782236 [10] Yomchinda T. A method of multirate sensor fusion for target tracking and localization using extended Kalman filter[C]//Asian Conference on Defence Technology-Japan, 2017: 1-7. [11] 蔡琳, 刘宇红.无损卡尔曼滤波算法在目标跟踪中的应用[J].自动化与仪器仪表, 2015(7): 112-115. Cai L, Liu Y H. Application of lossless Kalman filtering algorithm in target tracking[J]. Automation & Instrumentation, 2015(7): 112-115. [12] Jagan B O L, Rao S K, Lakshmi M K. Concert assessment of unscented and cubature kalman filters for target tracking[J]. Journal of Advanced Research in Dynamical & Control Systems, 2017, 9(4): 72-80. [13] 方建超, 周兴林, 毛雪松.利用多普勒激光雷达实现距离和速度同步测量[J].光电工程, 2016, 43(12): 212-218. doi: 10.3969/j.issn.1003-501X.2016.12.032 Fang J C, Zhou X L, Mao X S. Doppler laser radar for measuring range and speed simultaneously[J]. Opto-Electronic Engineering, 2016, 43(12): 212-218. doi: 10.3969/j.issn.1003-501X.2016.12.032 [14] 刘华军, 赖少发.汽车毫米波雷达目标跟踪的快速平方根CKF算法[J].南京理工大学学报, 2016, 40(1): 56-60, 66. Liu H J, Lai S F. Fast square root CKF for automotive millimeter-wave radar target tracking[J]. Journal of Nanjing University of Science and Technology, 2016, 40(1): 56-60, 66. [15] Moras J, Cherfaoui V, Bonnifait P. A lidar perception scheme for intelligent vehicle navigation[C]//2010 11th International Conference on Control Automation Robotics & Vision, 2010: 1809-1814. [16] 苏艳苹, 王战伟.极坐标系下的目标运动模型研究[J].河南科学, 2012, 30(2): 168-172. doi: 10.3969/j.issn.1004-3918.2012.02.008 Su Y P, Wang Z W. Target motion model in polar coordinates[J]. Henan Science, 2012, 30(2): 168-172. doi: 10.3969/j.issn.1004-3918.2012.02.008 -
Overview

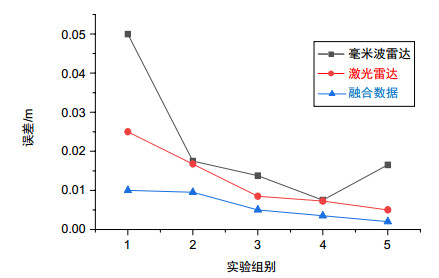
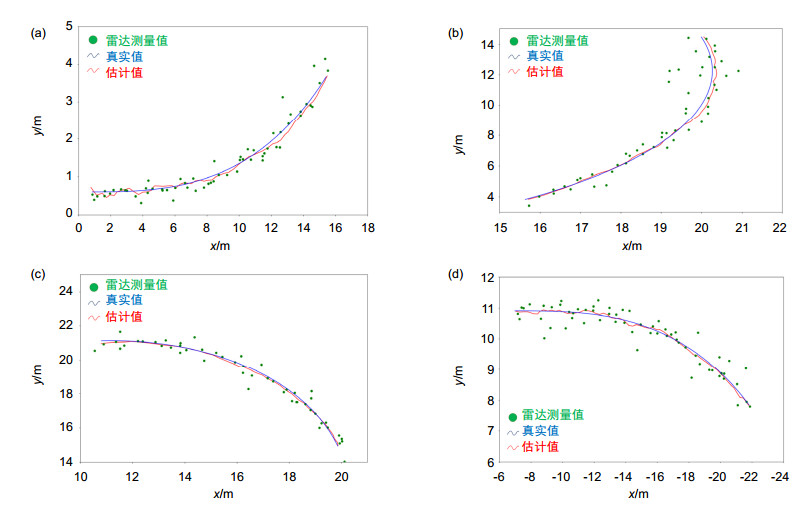
Overview: Unmanned driving refers to the technology of installing sensors such as vehicle-borne LiDAR, millimeter-wave radar, GPS and camera in a specific position of the vehicle and combining software algorithm and artificial intelligence to realize the autonomous and safe driving of the vehicle. In the research of unmanned vehicle, the state estimation of target detected by sensors is one of the key issues in environmental sensing technology. In this paper, an algorithm based on unscented Kalman filter is proposed to predict and update the position of the target based on the obtained radar data, which is used to estimate the target position of the unmanned vehicle dual radar system. The vehicle radar system in this paper is composed of four lines laser and millimeter wave radar. The calibrated vehicle coordinate system is a two-dimensional coordinate system parallel to the ground. On the basis of the system and coordinate system, the real radar data are collected and simulated in the experimental site. Experiments show that compared with single sensor, the measurement error of radar combination model is effectively reduced, and the accuracy of fusion data is improved. Compared with the most commonly used extended Kalman filtering algorithm, the mean square error of the moving direction of vehicle descends from 6.15 per thousand to 4.83 per thousand. The mean square error value of the average position decreases from 4.24 per thousand to 2.99 per thousand in the direction parallel to the front axle, which indicates that the estimation of the target position of this algorithm is more accurate and closer to the real value. In addition, in the same operating environment, the average time of processing 500 groups of radar data is reduced from 5.9 ms to 2.1 ms, proving that the algorithm has a higher algorithm efficiency. For the unmanned driving technology, it is obvious that this algorithm has more application prospects. In a word, the problem of target state estimation in the environment sensing technology of unmanned vehicle is studied in this paper. On this basis, unscented Kalman filter based on the combined measurement model of vehicle-borne LiDAR and millimeter-wave radar is proposed to estimate the position of the target detected by an unmanned vehicle. In the future research process, the algorithm proposed in this paper can also consider more target state parameters such as speed and acceleration, and add more sensors, such as cameras, GPS and INS, to improve the practicability of the whole system.
-
Access History
Figures(8)
Tables(2)
Article Metrics

Export File
Citation
Xiang Yi, Wang Yi, Zhang Jiachen, et al. Target location estimation for vehicle dual radar based on unscented Kalman filter[J]. Opto-Electronic Engineering, 2019, 46(7): 180339. doi: 10.12086/oee.2019.180339
Format
Content
 DownLoad:
DownLoad:


-
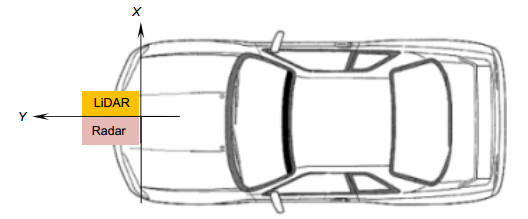
Figure 1.
The figure of vehicle coordinate system
-
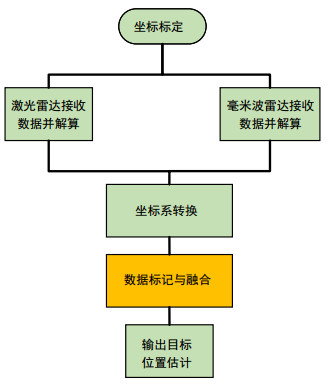
Figure 2.
Flow chart of the radar acquisition data preprocessing algorithm
-
Figure 3.
The schematic diagram of trajectory of the target measurement
-
Figure 4.
The actual scene of trajectory of the target measurement
-
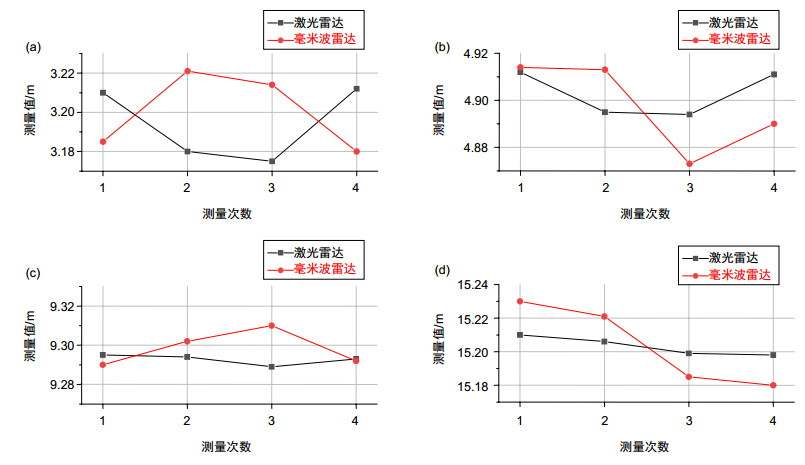
Figure 5.
Data statistics of a single radar sensor
-
Figure 6.
Experimental error diagram
-
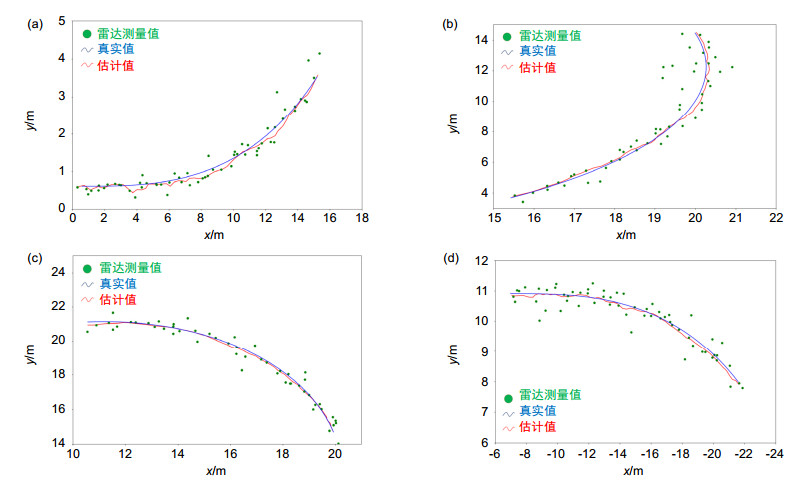
Figure 7.
The results of EKF experiments
-
Figure 8.
The experiments results of algorithm in this paper


