
 E-mail Alert
E-mail Alert RSS
RSS
| Citation: |

|
Research status and key technologies analysis of operating robots for nuclear environment
-
Abstract
To introduce and analyze the development history and research status of operating robots for nuclear environment at home and abroad, the common system structure and classification based on main functions for operating robots for nuclear environment are summarized. Based on the application requirements of operating robots for nuclear environment, it is concluded that the key technologies in urgent need of breakthrough for nuclear robots are radiation reinforcement, communication method, photoelectric detection, intelligent control technology, etc. Finally, with the increasing scale of China's nuclear industry and the increasing demand for safety assurance, the application scenarios of operating robots for nuclear environment are condensed, and the future development trend of operating robots for nuclear environment is predicted.-
Keywords:
- nuclear environment /
- robot /
- radiation hardening /
- photoelectric detection
-

-
References
[1] 杜树标, 蒋韦韦, 丁泮.核环境机器人现状及关键技术分析[J].兵器装备工程学报, 2016, 37(5): 93-97, 103. Du S B, Jiang W W, Ding P. Status and key technologies analysis for robot in nuclear applications[J]. Journal of Sichuan Ordnance, 2016, 37(5): 93-97, 103. [2] 刘波, 王欣, 吴王锁, 等.机器人在核与辐射事故应急中的应用展望[J].工业安全与环保, 2015, 41(1): 62-64. Liu B, Wang X, Wu W S, et al. The application prospect of robot in the nuclear and radiation emergency[J]. Industrial Safety and Environmental Protection, 2015, 41(1): 62-64. [3] Nagatani K, Kiribayashi S, Okada Y, et al. Emergency response to the nuclear accident at the Fukushima Daiichi Nuclear Power Plants using mobile rescue robots[J]. Journal of Field Robotics, 2013, 30(1): 44-63. doi: 10.1002/rob.21439 [4] Kim I S, Choi Y, Jeong K M. A new approach to quantify safety benefits of disaster robots[J]. Nuclear Engineering and Technology, 2017, 49(7): 1414-1422. doi: 10.1016/j.net.2017.06.008 [5] Edmondson R, Vaden J, Hyatt B, et al. 3D vision upgrade kit for TALON robot[J]. Proceedings of SPIE, 2010, 7692: 76920J. doi: 10.1117/12.851916 [6] Otaki M. Environmental monitoring robots for nuclear emergencies[J]. Advanced Robotics, 2002, 16(6): 501-504. doi: 10.1163/156855302320535827 [7] Byrd J S, Devries K R. A six-legged telerobot for nuclear applications development[J]. The International Journal of Robotics Research, 1990, 9(2): 43-52. [8] Meleran H, Harry H T. Utility/manufacturers robot user group: a status overview during its first seven years[C]//Proceedings of the 2nd ASME-JSME Nuclear Engineering Joint Conference, 1993: 263-266. [9] Bartholet T G. OEDX I: A new class of mobile robotics[J]. Robotics and Remote Handling in Hostile Environments, 1984, 18(10): 261-268. [10] Roman H T. Robotic applications in PSE & G's nuclear and fossil power plants[J]. IEEE Transactions on Energy Conversion, 1993, 8(3): 584-592. doi: 10.1109/60.257077 [11] Houssay L P. Robotics and radiation hardening in the nuclear industry[D]. Gainesville, FL: University of Florida, 2000. [12] Kobayashi T, Miyajima K, Yanagihara S. Development of remote surveillance squads for information collection on nuclear accidents[J]. Advanced Robotics, 2002, 16(6): 497-500. doi: 10.1163/156855302320535818 [13] Oka K, Shibanuma K. Development of a radiation-proof robot[J]. Advanced Robotics, 2002, 16(6): 493-496. doi: 10.1163/156855302320535809 [14] Abouaf J. Trial by fire: teleoperated robot targets Chernobyl[J]. IEEE Computer Graphics and Applications, 1998, 18(4): 10-14. doi: 10.1109/38.689654 [15] Kawatsuma S, Fukushima M, Okada T. Emergency response by robots to Fukushima‐Daiichi accident: summary and lessons learned[J]. Industrial Robot, 2012, 39(5): 428-435. doi: 10.1108/01439911211249715 [16] Mano T, Hamada S. Development of a robot system for nuclear emergency preparedness[J]. Advanced Robotics, 2002, 16(6): 477-479. [17] Hosoda Y, Yamamoto H, Hattori M, et al. 'SWAN': a robot for nuclear disaster prevention support[J]. Advanced Robotics, 2002, 16(6): 485-488. doi: 10.1163/156855302320535782 [18] Isozaki Y, Nakai K. Development of a work robot with a manipulator and a transport robot for nuclear facility emergency preparedness[J]. Advanced Robotics, 2002, 16(6): 489-492. [19] Yuguchi Y, Satoh Y. Development of a robotic system for nuclear facility emergency preparedness—observing and work-assisting robot system[J]. Advanced Robotics, 2002, 16(6): 481-484. doi: 10.1163/156855302320535773 [20] Nagatani K, Kiribayashi S, Okada Y, et al. Emergency response to the nuclear accident at the FuKushima Daiichi nuclear power plants using mobile rescue robots[J]. Journal of Field Robotics, 2013, 30(1): 44-63. [21] Qian H H, Xu Y S, Xu W F. The State-of-arts and key technologies for telerobotics in nuclear applications[C]//Proceedings of the 32nd Chinese Control Conference, 2013: 6016-6017. [22] 陈法国, 杨明明, 韩毅, 等.机器人在福岛核事故中的应用和启示[J].辐射防护, 2018, 38(4): 344-351. Chen F G, Yang M M, Han Y, et al. Lessons learned from robots used in Fukushima nuclear accident[J]. Radiation Protection, 2018, 38(4): 344-351. [23] 左民, 杨汝清.我国核工业中的遥控技术与机器人技术的应用与开发[J].机器人, 1990, 12(2): 62-63. [24] 杨汝清, 宋克威. "勇士号"遥控移动式作业机器人[J].高技术通讯, 1997, 7(2): 11-14. Yang R Q, Song K W. A "warrior" teleoperated mobile robot[J]. High Technology Letters, 1997, 7(2): 11-14. [25] 花永涛, 葛良全, 杨强, 等.关于国内首次采用遥控机械设备处置辐照卡源故障[J].核电子学与探测技术, 2012, 32(8): 953-955. Hua Y T, Ge L Q, Yang Q, et al. About the first domestic method combining with nuclear and automation technology to dispose stucking radioactive sources[J]. Nuclear Electronics & Detection Technology, 2012, 32(8): 953-955. [26] 崔建伟.东南大学研制成功小型核化探测与应急处理遥操作机器人[J].机器人技术与应用, 2012(1): 44-45. [27] 李怀兵, 张韬懿, 丑武胜.核辐射探测与应急处理机器人的小型机械臂系统设计[J].高技术通讯, 2011, 21(1): 101-105. Li H B, Zhang T Y, Chou W S. Design of miniature manipulator systems for nuclear detecting and emergency processing robots[J]. Chinese High Technology Letters, 2011, 21(1): 101-105. [28] Zhang X J, Zhang J H, Yuan J, et al. Development of an underwater robot for nuclear reactor vessel[C]//2013 IEEE International Conference on Robotics and Biomimetics, 2013: 1699-1703. [29] 刘青松, 张一心, 向文元, 等.核电站机器人技术应用现状及发展均势[J].机器人技术与应用, 2011(5): 12-16. Liu Q S, Zhang Y X, Xiang W Y, et al. Current application and development direction of robot technology for nuclear power station[J]. Robot Technique and Application, 2011(5): 12-16. [30] 王雪竹, 陈国栋, 杜佳, 等.核电站履带式开门机器人运动规划[J].机械设计与制造, 2019(8): 243-245, 250. Wang X Z, Chen G D, Du J, et al. Door-opening motion planning of a robot with tracked mobile base for nuclear power plants[J]. Machinery Design & Manufacture, 2019(8): 243-245, 250. [31] 窦普, 廖礼斌, 张志刚.基于μC/OS-Ⅱ水下异物打捞机器人控制系统的设计[J].计算机测量与控制, 2014, 22(7): 2100-2102. Dou P, Liao L B, Zhang Z G. Design of a μC/OS-Ⅱ based control system for a underwater foreign-salvage robot[J]. Computer Measurement & Control, 2014, 22(7): 2100-2102. [32] 冯常, 窦普, 陈树才.小型水下观测机器人设计与控制的研究[J].计算机测量与控制, 2009, 17(4): 672-674, 678. Feng C, Dou P, Chen S C. Study of mini underwater observation robot design and control[J]. Computer Measurement & Control, 2009, 17(4): 672-674, 678. [33] 魏晓霞, 冯常, 蒲小琼.水下双功能机器人的机械手设计与分析[J].机械, 2015, 42(6): 50-55. Wei X X, Feng C, Pu X Q. Design and analysis of manipulator based on the double function underwater robot[J]. Machinery, 2015, 42(6): 50-55. [34] Zakaria A H, Mustafah Y M, Abdullah J, et al. Development of autonomous radiation mapping robot[J]. Procedia Computer Science, 2017, 105: 81-86. doi: 10.1016/j.procs.2017.01.203 [35] Gu B W, Choi S Y, Choi Y S, et al. Novel roaming and stationary tethered aerial robots for continuous mobile missions in nuclear power plants[J]. Nuclear Engineering and Technology, 2016, 48(4): 982-996. doi: 10.1016/j.net.2016.02.014 [36] 张明路, 彭平, 张小俊.特殊环境下服役机器人发展现状及其关键技术研究[J].河北工业大学学报, 2013, 42(1): 70-75. Zhang M L, Peng P, Zhang X J. A study of the recent development and key technologies of advanced robots served in special circumstances[J]. Journal of Hebei University of Technology, 2013, 42(1): 70-75. [37] 沈华亚, 朱万宁, 董强敏, 等.耐强辐射遥控探测机器人研制[J].核电子学与探测技术, 2015, 35(1): 74-78. Shen H Y, Zhu W N, Dong Q M, et al. Development of the tele-control robot for nuclear detection in intense radiation environment[J]. Nuclear Electronics & Detection Technology, 2015, 35(1): 74-78. [38] 罗中兴, 李霄, 左莉, 等.无人机载核辐射监测及气溶胶采样系统试验分析[J].环境监测管理与技术, 2019, 31(1): 58-60. Luo Z X, Li X, Zuo L, et al. Experimental study on nuclear radiation monitoring and aerosol sampling system by unmanned aerial vehicle[J]. The Administration and Technique of Environmental Monitoring, 2019, 31(1): 58-60. [39] 成丰, 柳宗晓.水下机器人在核电厂取水口海生物监测中的初步应用[J].机器人技术与应用, 2016(4): 27-30. [40] 熊鹏文.核电站巡检与应急处理机器人的关键技术研究[D].南京: 东南大学, 2015. Xiong P W. Research on critical technology of nuclear plant inspection and emergence robot[D]. Nanjing: Southeast University, 2015. [41] Jilek T, Zalud L, Kocmanova P. Robotic autonomous outdoor gamma radiation monitoring and mapping[J]. International Journal of Systems Applications, Engineering & Development, 2016, 10(2): 162-168. [42] Wang C Z, Hu S, Gao C M, et al. Nuclear radiation degradation study on HD camera based on CMOS image sensor at different dose rates[J]. Sensors, 2018, 18(2): 514. doi: 10.3390/s18020514 [43] 王从政, 胡松, 高椿明, 等.水下热扰动的光学成像失真问题研究[J].光电工程, 2019, 46(10): 180438. doi: 10.12086/oee.2019.180438 Wang C Z, Hu S, Gao C M, et al. Study on optical imaging distortion of underwater thermal disturbance[J]. Opto-Electronic Engineering, 2019, 46(10): 180438. doi: 10.12086/oee.2019.180438 [44] 韩延龙, 栾伟玲, 张衍, 等.电子器件热防护技术及在核机器人中的应用[J].核科学与工程, 2015, 35(1): 112-122. Han Y L, Luan W L, Zhang Y, et al. Thermal control technologies of electronic devices and their applications on nuclear robots[J]. Nuclear Science and Engineering, 2015, 35(1): 112-122. [45] 徐守龙, 邹树梁, 黄有骏, 等.核电厂事故工况下监控图像传感器可用性分析与加固[J].核电子学与探测技术, 2016, 36(6): 651-655. Xu S L, Zou S L, Huang Y J, et al. Availability evaluation and improvement plan of image sensors in accident of nuclear power plant[J]. Nuclear Electronics & Detection Technology, 2016, 36(6): 651-655. [46] 王希涛.一种辐射加固优化的核探测机器人控制系统设计[J].核电子学与探测技术, 2012, 32(5): 547-551, 626. Wang X T. Control system design of a nuclear detection robot based on radiation-hardened optimization[J]. Nuclear Electronics & Detection Technology, 2012, 32(5): 547-551, 626. [47] 陈法国, 朱万宁, 董强敏, 等.遥控机器人的耐辐射设计和测试[J].核电子学与探测技术, 2016, 36(2): 121-124. Chen F G, Zhu W N, Dong Q M, et al. The radiation tolerance design and test of a tele-controlled robot[J]. Nuclear Electronics & Detection Technology, 2016, 36(2): 121-124. [48] 陈嘉杰, 孙飞翔, 董超群, 等.核燃料组件变形检测机器人研究[J].机器人技术与应用, 2018(6): 40-42. -
Overview

Overview: The photon counting LiDAR plays an important role in the long distance measurement because of the high sensitivity to a single photon and the ability of providing accurate photon arrival time. It uses statistical sampling technology which needs to accumulate enough photon events to establish a statistical histogram and extract echo information through the histogram. However, the process will greatly reduce the measurement speed of the system. If there is a relative movement between the system and target, the laser pulses of multiple cycles will have different flight time. Then it can be difficult to extract the distance of the target as the echo signals are difficult to reflect the clustering characteristics in time. In order to solve this problem, a macro/sub-pulse coded photon counting LiDAR is proposed. The measurement speed of the macro/sub-pulse method is determined by the total time of all sub-pulses in the period. Compared with pulse accumulation, the macro/sub-pulse method can realize fast measurement. In the system, the emitting pulse is divided into two parts by a proportional beam splitter, one part is directly detected by PIN and used as the transmitting reference signal, and the other part is used to detect targets. Echo signals scattered by the target are received by optical system and detected by GM-APD (Geiger-mode avalanche photodiode). It should be pointed out that in the macro/sub-pulse LiDAR system, any two sub-pulses have different pulse intervals, which can effectively avoid distance blur. In this paper, the theoretical model of macro/sub-pulse coded photon counting LiDAR is established. To obtain the distance of the target, a method which accumulates the sub-pulses with different time shift operations was proposed in this article. For the time-shifted pulse accumulation method, there is no special requirement for the received signal, but the sub-pulse interval of the transmitted signal needs to be known in advance. To meet this requirement, a PIN detector is used to record the transmitting sequence. Within a period, the echo signals detected by GM-APD detector are shifted sequentially according to the interval of sub-pulses, and the sequentially shifted echo signals are accumulated. The position of the cumulative peak corresponds to the flight time of the sub-pulse. Also, in the third part of this article, the influence of false alarm probability and detection probability were analyzed. The effectiveness of macro/sub-pulse coded photon counting LiDAR is verified by Monte Carlo simulation and experiment.
-
Access History

Figures(10)
Tables(1)
Article Metrics


Export File
Citation
Format
Content
 DownLoad:
DownLoad:





-
Figure 1.
Nuclear robot. (a) Underwater multi-function robot[31]; (b) Nuclear emergency rescue robot[32]
-
Figure 2.
Diagram of a nuclear underwater robot[32]
-
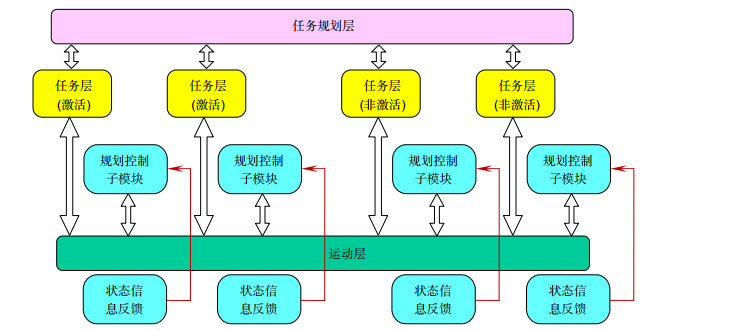
Figure 3.
Hierarchical control structure of a nuclear robot[31]
-
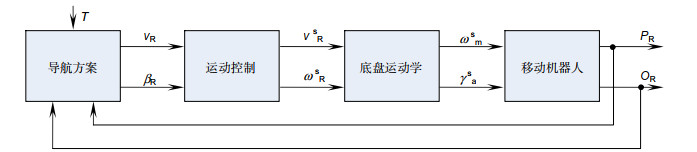
Figure 4.
Block scheme of the navigation method[41]
-
Figure 5.
Radiation tolerant underwater camera[42]
-
Figure 6.
Packbot robot[1]
-
Figure 7.
Serialized nuclear robots. (a) Land patrol robot; (b) Underwater working robot; (c) Underwater inspection robot
-
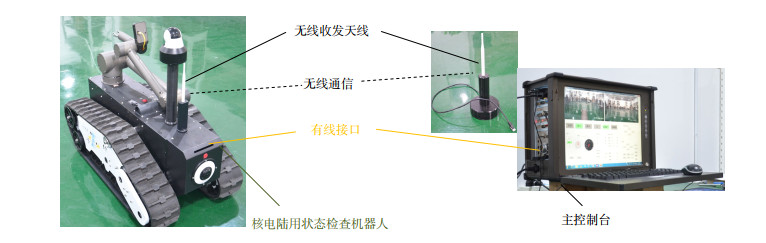
Figure 8.
Land patrol robot for nuclear power station
-
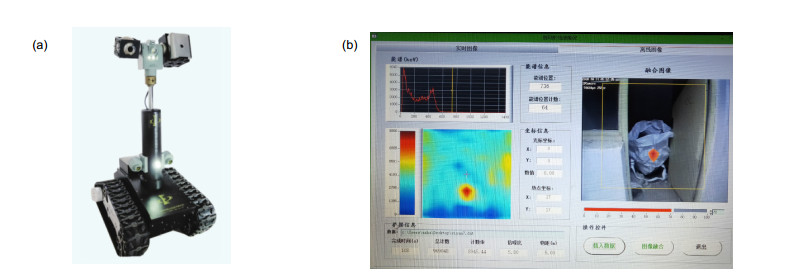
Figure 9.
Patrol nuclear robot. (a) Robot noumenon; (b) Operation interface
-
Figure 10.
Inspection robot for fuel assembly[48]


