
 E-mail Alert
E-mail Alert RSS
RSS
| Citation: |

|
Target tracking algorithm based on YOLOv3 and ASMS
-
Abstract
In order to solve the problem of loss when the target encounters occlusion or the speed is too fast during the automatic tracking process, a target tracking algorithm based on YOLOv3 and ASMS is proposed. Firstly, the target is detected by the YOLOv3 algorithm and the initial target area to be tracked is determined. After that, the ASMS algorithm is used for tracking. The tracking effect of the target is detected and judged in real time. Repositioning is achieved by quadratic fitting positioning and the YOLOv3 algorithm when the target is lost. Finally, in order to further improve the efficiency of the algorithm, the incremental pruning method is used to compress the algorithm model. Compared with the mainstream algorithms, experimental results show that the proposed algorithm can solve the lost problem when the tracking target is occluded, improving the accuracy of target detection and tracking. It also has advantages of low computational complexity, time-consuming, and high real-time performance. -

-
References
[1] 卢湖川, 李佩霞, 王栋. 目标跟踪算法综述[J]. 模式识别与人工智能, 2018, 31(1): 61-76. Lu H C, Li P X, Wang D. Visual object tracking: a survey[J]. Pattern Recognit Artif Intell, 2018, 31(1): 61-76. [2] 李玺, 查宇飞, 张天柱, 等. 深度学习的目标跟踪算法综述[J]. 中国图象图形学报, 2019, 24(12): 2057-2080. doi: 10.11834/jig.190372 Li X, Zha Y F, Zhang T Z, et al. Survey of visual object tracking algorithms based on deep learning[J]. J Image Graph, 2019, 24(12): 2057–2080. doi: 10.11834/jig.190372 [3] 葛宝义, 左宪章, 胡永江. 视觉目标跟踪方法研究综述[J]. 中国图象图形学报, 2018, 23(8): 1091-1107. Ge B Y, Zuo X Z, Hu Y J. Review of visual object tracking technology[J]. J Image Graph, 2018, 23(8): 1091–1107. [4] Sun D Q, Roth S, Black M J. Secrets of optical flow estimation and their principles[C]//Proceedings of 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, 2010: 2432-2439. [5] Nummiaro K, Koller-Meier E, Van Gool L. An adaptive color-based particle filter[J]. Image Vis Comput, 2003, 21(1): 99-110. doi: 10.1016/S0262-8856(02)00129-4 [6] Comaniciu D, Ramesh V, Meer P. Real-time tracking of non-rigid objects using mean shift[C]//Proceedings IEEE Conference on Computer Vision and Pattern Recognition. CVPR 2000 (Cat. No. PR00662), Hilton Head Island, SC, 2002: 142–149. [7] Babenko B, Yang M H, Belongie S. Robust object tracking with online multiple instance learning[J]. IEEE Trans Pattern Anal Mach Intell, 2011, 33(8): 1619–1632. doi: 10.1109/TPAMI.2010.226 [8] Kalal Z, Mikolajczyk K, Matas J. Tracking-learning-detection[J]. IEEE Trans Pattern Anal Mach Intell, 2012, 34(7): 1409–1422. doi: 10.1109/TPAMI.2011.239 [9] Avidan S. Support vector tracking[J]. IEEE Trans Pattern Anal Mach Intell, 2004, 26(8): 1064-1072. doi: 10.1109/TPAMI.2004.53 [10] Vojir T, Noskova J, Matas J. Robust scale-adaptive mean-shift for tracking[C]//Proceedings of the 18th Scandinavian Conference Scandinavian Conference on Image Analysis, Espoo, Finland, 2014: 652–663. [11] Girshick R, Donahue J, Darrell T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation[C]//Proceedings of 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, 2014: 580–587. [12] Girshick R. Fast R-CNN[C]//Proceedings of the IEEE International Conference on Computer Vision, Santigago, Chile, 2015: 1440–1448. [13] Ren S Q, He K M, Girshick R, et al. Faster R-CNN: towards real-time object detection with region proposal networks[J]. IEEE Trans Pattern Anal Mach Intell, 2017, 39(6): 1137–1149. doi: 10.1109/TPAMI.2016.2577031 [14] Redmon J, Divvala S, Girshick R, et al. You only look once: unified, real-time object detection[C]//Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, 2016: 779–788. [15] Liu W, Anguelov D, Erhan D, et al. SSD: single shot MultiBox detector[C]//Proceedings of the 14th European Conference European Conference on Computer Vision, Amsterdam, 2016: 21–37. [16] Redmon J, Farhadi A. YOLOv3: an incremental improvement[EB/OL]. [2020-02-10]. https://pjreddie.com/media/files/papers/YOLOv3.pdf. [17] Redmon J, Farhadi A. YOLO9000: better, faster, stronger[C]//Proceedings of 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, 2017: 6517–6525. [18] Fu C Y, Liu W, Ranga A, et al. DSSD: deconvolutional single shot detector[EB/OL]. [2020-02-10]. https://arxiv.org/pdf/1701.06659.pdf. [19] Li Z X, Zhou F Q. FSSD: feature fusion single shot multibox detector[EB/OL]. [2020-02-10]. https://arxiv.org/pdf/1712.00960.pdf. [20] Liu Z, Li J G, Shen Z Q, et al. Learning efficient convolutional networks through network slimming[C]//Proceedings of 2017 IEEE International Conference on Computer Vision, Venice, Italy, 2017: 2755–2763. [21] Chen G B, Choi W, Yu X, et al. Learning efficient object detection models with knowledge distillation[EB/OL]. [2020-02-10] http://papers.nips.cc/paper/6676-learning-efficient-object-detection-models-with-knowledge-distillation.pdf. [22] Wu J X, Leng C, Wang Y H, et al. Quantized convolutional neural networks for mobile devices[C]//Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, 2016: 4820–4828. [23] Huang G, Chen D L, Li T H, et al. Multi-scale dense networks for resource efficient image classification[EB/OL]. [2020-02-10] https://arxiv.org/pdf/1703.09844.pdf. [24] He M, Zhao H W, Wang G Z, et al. Deep neural network acceleration method based on sparsity[C]//Proceedings of the 15th International Forum International Forum on Digital TV and Wireless Multimedia Communications, Shanghai, China, 2019: 133–145. [25] Henriques J F, Caseiro R, Martins P, et al. High-speed tracking with kernelized correlation filters[J]. IEEE Trans Pattern Anal Mach Intell, 2015, 37(3): 583–596. doi: 10.1109/TPAMI.2014.2345390 [26] Song Y B, Ma C, Wu X H, et al. VITAL: visual tracking via adversarial learning[C]//Proceedings of 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, 2018: 8990–8999. [27] Fan H, Ling H B. SANet: structure-aware network for visual tracking[C]//Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition Workshops, Honolulu, Hl, 2017: 2217–2224. -
Overview

Overview: Tracking mobile objects has always been a challenging task and a hot research direction. Now, with the continuous improvement of hardware facilities and the rapid development of artificial intelligence technology, the technology of tracking mobile objects becomes more and more important. In order to solve the problem of loss when the target encounters occlusion or the speed is too fast during the automatic tracking process, this paper combines traditional algorithms with machine learning algorithms. As well as, a target tracking algorithm based on YOLOv3 and ASMS is proposed. Then, by pruning YOLOv3 and combining it with ASMS, the algorithm this paper proposed runs faster. The method of this paper first performs foreground detection through YOLOv3 to find the initial target area for tracking, which eliminats the need to manually circle the region of interest, and then performs tracking based on the ASMS algorithm. The algorithm based on YOLOv3 and ASMS detects and judges the tracking effect of the target in real time. When the tracking frame of ASMS is significantly offset from the detection target or the tracking frame is too large and contains too much background information, the tracking accuracy will decrease. If the target is blocked or moves too fast, it will be lost. For these two cases, YOLOv3 and quadratic fitting positioning are used to relocate to improve the accuracy of the algorithm and solve the problem of target loss. In order to further improve the efficiency of the algorithm, the method of incremental pruning is applied to compress YOLOv3. This article fine-tunes the network to reduce the reduction in algorithm accuracy caused by channel pruning and to prevent excessive pruning from causing network performance degradation. When performing model compression, firstly a scaling factor regular term is introduced for the sparse training of the convolutional layer channel of the YOLOv3 network. Then the global threshold is used to remove the components that are not important to the model reasoning, that is, the less scoring parts. An incremental pruning strategy is further used to prevent network degradation caused by excessive pruning. Finally, this paper fine-tunes the pruning model to compensate for potential temporary performance degradation. Compared with YOLOv3 in COCO database, the experimental results show that the speed of the best pruned algorithm is increased by 49.9%, the model parameters are reduced by 92.0%, and the body weight is reduced by 91.9%. After combining the pruned YOLOv3 with the ASMS algorithm, the experimental results show that the running speed of the proposed joint algorithm is 32.5% faster than the unpruned joint algorithm when the target has occlusion, and the accuracy is much better than that of ASMS. The proposed algorithm can solve the lost problem when the tracking target is occluded, improving the accuracy of target detection and tracking. Moreover, it has advantages of low computational complexity, time-consuming, and high real-time performance.
-
Access History
Figures(9)
Tables(3)
Article Metrics


Export File
Citation
Format
Content
 DownLoad:
DownLoad:



-
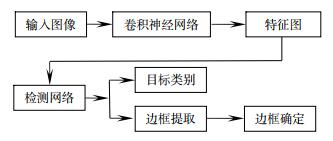
Figure 1.
Block diagram of YOLOv3
-
Figure 2.
YOLOv3 pruned through sparse training and channel pruning
-
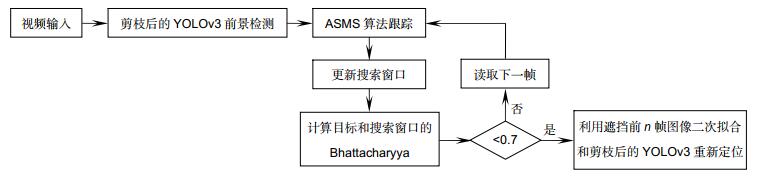
Figure 3.
The tracking algorithm flow chart based on YOLOv3 and ASMS
-
Figure 4.
The tracking performance of algorithm based on YOLOv3-95 and ASMS
-
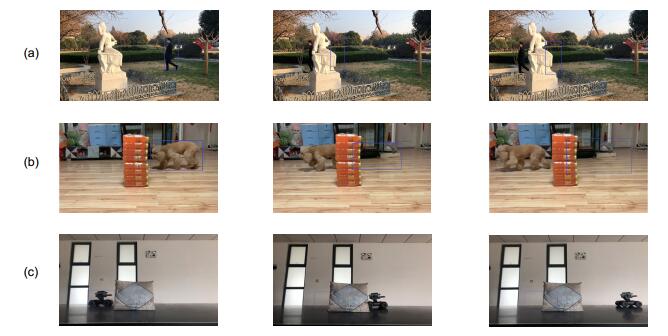
Figure 5.
Tracking performance of the ASMS algorithm. (a) Pedestrian; (b) Animal; (c) Car
-
Figure 6.
Tracking performance of the KCF algorithm. (a) Pedestrian; (b) Animal; (c) Car
-
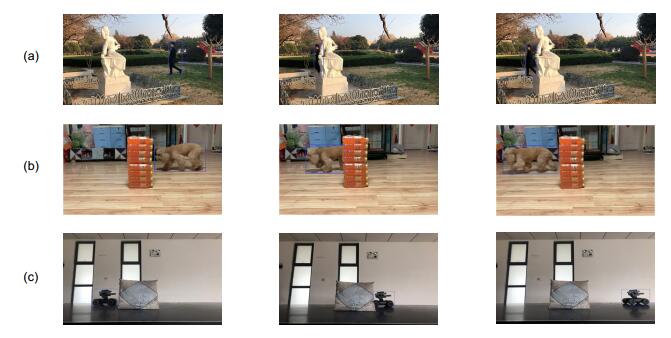
Figure 7.
Tracking performance of the algorithm based on YOLOv3-95 and ASMS. (a) Pedestrian; (b) Animal; (c) Car
-
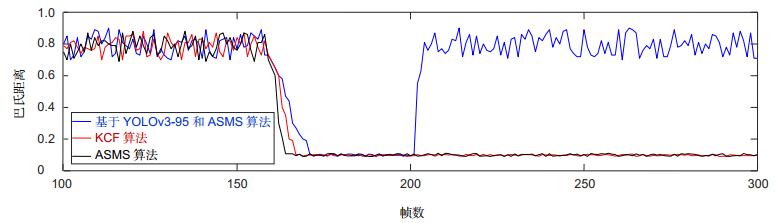
Figure 8.
Bhattacharyya coefficient curves of different algorithms
-
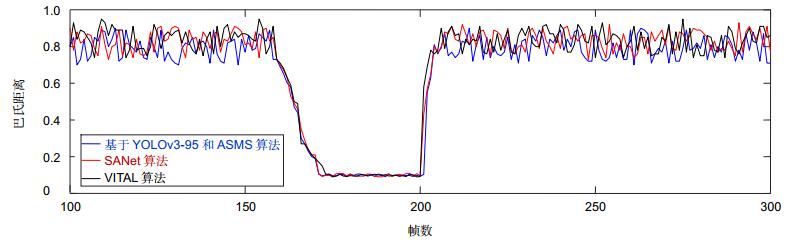
Figure 9.
Bhattacharyya coefficient curves of different algorithms


