
 E-mail Alert
E-mail Alert RSS
RSS
| Citation: |

|
An algorithm for the bee colony drone to use wireless ultraviolet for cooperative obstacle avoidance
-
Abstract
For complex battlefield environments, it is especially important to ensure the safety of flight between UAV formations and reliable communication within the formation. This paper proposes an algorithm for collaborative avoidance using wireless ultraviolet light between drones in a bee colony drone formation. Combined with the above algorithm and using the characteristics of wireless ultraviolet light coverage, the avoidance strategy of ultraviolet virtual fence is designed. And by enhancing the vector field histogram method to improve the cost function of the state of motion of the drone when performing mutual avoidance. In addition, the algorithm uses the Unscented Kalman Filter to predict the flight status of nearby Uninhabited Aerial Vehicles. The simulation results show that in the avoidance simulations of the two prediction scenarios, the overall motion trajectory of this algorithm is smoother than that of the enhance vector field histogram method. At the same time, there is no obvious jitter when local avoidance occurs, the total length of the avoidance path is reduced by 3.46% on average, and the total time consumption is reduced by 18.94%. This verifies that the wireless ultraviolet cooperative avoidance algorithm in a bee colony drone formation is effective. -

-
References
[1] 于力, 魏平, 马振利, 等.外军反蜂群无人机技术发展分析[J].飞航导弹, 2017(12): 26–30. Yu L, Wei P, Ma Z L, et al. Analysis on the development of foreign army anti-bee colony drone technology[J]. Aerodynamic Missile Journal, 2017(12): 26–30. [2] 罗畅.非视距光通信信号处理研究与基带系统设计[D].北京: 中国科学院研究生院, 2011. Luo C. The study of signal processing and design of base band system for non-line-of-sight optical communication[D]. Beijing: University of Chinese Academy of Sciences, 2011. [3] 谭雁英, 李洋, 周军, 等.复杂环境下基于A*算法的无人机路径再规划[J].系统工程与电子技术, 2017, 39(6): 1268–1273. Tan Y Y, Li Y, Zhou J, et al. Path replanning approach for UAV based on A* algorithm in complex environment[J]. Systems Engineering and Electronics, 2017, 39(6): 1268–1273. [4] Mac T T, Copot C, Tran D T, et al. A hierarchical global path planning approach for mobile robots based on multi-objective particle swarm optimization[J]. Applied Soft Computing, 2017, 59: 68–76. doi: 10.1016/j.asoc.2017.05.012 [5] Roberge V, Tarbouchi M, Labonte G. Comparison of parallel genetic algorithm and particle swarm optimization for real-time UAV path planning[J]. IEEE Transactions on Industrial Informatics, 2013, 9(1): 132–141. doi: 10.1109/TII.2012.2198665 [6] Wu Z Y, Li J H, Zuo J M, et al. Path planning of UAVs based on collision probability and Kalman filter[J]. IEEE Access, 2018, 6: 34237–34245. doi: 10.1109/ACCESS.2018.2817648 [7] Chen Y B, Luo G C, Mei Y S, et al. UAV path planning using artificial potential field method updated by optimal control theory[J]. International Journal of Systems Science, 2016, 47(6): 1407–1420. doi: 10.1080/00207721.2014.929191 [8] Qu P R, Xue J R, Ma L, et al. A constrained VFH algorithm for motion planning of autonomous vehicles[C]//Proceedings of 2015 IEEE Intelligent Vehicles Symposium (Ⅳ), 2015. [9] Babinec A, Duchoň F, Dekan M, et al. VFH*TDT (VFH* with time dependent tree): a new laser rangefinder based obstacle avoidance method designed for environment with non-static obstacles[J]. Robotics and Autonomous Systems, 2014, 62(8): 1098–1115. doi: 10.1016/j.robot.2014.05.003 [10] 张洋洋, 瞿栋, 柯俊, 等.基于速度障碍法和动态窗口法的无人水面艇动态避障[J].上海大学学报(自然科学版), 2017, 23(1): 1–16. Zhang Y Y, Qu D, Ke J, et al. Dynamic obstacle avoidance for USV based on velocity obstacle and dynamic window method[J]. Journal of Shanghai University (Natural Science Edition), 2017, 23(1): 1–16. [11] Ji J, Khajepour A, Melek W W, et al. Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints[J]. IEEE Transactions on Vehicular Technology, 2017, 66(2): 952–964. doi: 10.1109/TVT.2016.2555853 [12] Cui R X, Li Y, Yan W S. Mutual information-based multi-AUV path planning for scalar field sampling using multidimensional RRT[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2016, 46(7): 993–1004. doi: 10.1109/TSMC.2015.2500027 [13] da Silva Arantes J, da Silva Arantes M, Toledo C F M, et al. Heuristic and genetic algorithm approaches for UAV path planning under critical situation[J]. International Journal on Artificial Intelligence Tools, 2017, 26(1): 1760008. [14] 赵太飞, 余叙叙, 包鹤, 等.无线日盲紫外光测距定位方法[J].光学精密工程, 2017, 25(9): 2324–2332. Zhao T F, Yu X X, Bao H, et al. Ranging and positioning method using wireless solar blind ultraviolet[J]. Optics and Precision Engineering, 2017, 25(9): 2324–2332. [15] 张亚兰, 赵成萍, 严华.基于改进双向A*和向量场直方图算法的无人机航路规划[J].科学技术与工程, 2019, 19(4): 179–184. doi: 10.3969/j.issn.1671-1815.2019.04.029 Zhang Y L, Zhao C P, Yan H. Path planning for unmanned aerial vehicles using improved bidirectional A* and vector field histogram algorithm[J]. Science Technology and Engineering, 2019, 19(4): 179–184. doi: 10.3969/j.issn.1671-1815.2019.04.029 [16] 孙扬智, 肖世德, 潘绍飞, 等.融合卡尔曼滤波的VFH避障算法[J].江苏科技大学学报(自然科学版), 2015, 29(4): 373–377, 398. Sun Y Z, Xiao S D, Pan S F, et al. VFH algorithm for obstacle avoidance based on Kalman Filter[J]. Journal of Jiangsu University of Science and Technology (Natural Science Edition), 2015, 29(4): 373–377, 398. [17] Dai R, Cochran J, Jr. Path planning and state estimation for unmanned aerial vehicles in hostile environments[J]. Journal of Guidance, Control, and Dynamics, 2010, 33(2): 595–601. [18] 关英姿, 宋春林, 董惠娟.空间自由漂浮机器人对运动目标抓捕的路径规划[J].机器人, 2017, 39(6): 803–811. Guan Y Z, Song C L, Dong H J. Path planning of the free-floating manipulator for capturing a moving target[J]. Robot, 2017, 39(6): 803–811. -
Overview

Overview: Uninhabited aerial vehicles (UAVs) are widely used not only in civil fields such as power inspection and environmental monitoring, but also in military applications such as reconnaissance, surveillance and confusion. The drone "bee colony" is composed of a group of small unmanned aerial vehicles that work together independently. It has excellent features such as low cost, high damage resistance, good sensing ability, strong collaboration ability and functional distribution, which can improve the efficiency of completing task. In the complex electromagnetic environment of the battlefield, it is especially important to ensure the flight safety between the formation of the drone group and the reliable communication within the formation. The advantages of wireless ultraviolet communication mainly include small background noise, strong anti-electromagnetic interference capability, all-weather non-direct view communication, low power consumption, high integration, easy to load, etc., which can meet the communication requirements in this environment.
This paper proposes an algorithm for collaborative avoidance using wireless ultraviolet light between drones in a bee colony drone formation. Through combining avoidance algorithm with the characteristics of wireless ultraviolet light coverage, a wireless ultraviolet virtual fence avoidance strategy is proposed. Considering the relationship between the enhanced vector field histogram method and its own motion state to improve the cost function and verify the effectiveness of the avoidance algorithm. The unscented Kalman filter predictor is used to predict the flight state of the adjacent drone in order to achieve safe and efficient avoidance. Through computer simulation in two prediction scenarios, the results show that the improved enhanced vector field histogram method has smooth overall motion trajectory and good avoidance effect. Compared with the original algorithm, this algorithm has no obvious jitter when it is partially avoided, the turning arc is large and there is no sharp turn. It is more suitable for the actual application and reduces the path length and time consumption. In summary, in the complex battlefield environment, the bee swarm drone can not only use airborne wireless ultraviolet equipment to achieve stable network communication, it can also use improved enhanced vector field methods based on wireless ultraviolet light to enable efficient avoidance between drones in a bee colony drone formation.
-
Access History
Figures(8)
Tables(3)
Article Metrics

Export File
Citation
Format
Content
 DownLoad:
DownLoad:



-
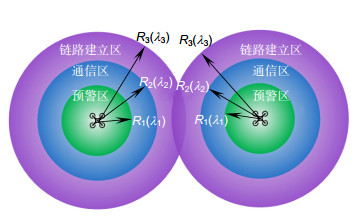
Figure 1.
Wireless UV virtual fence model
-
Figure 2.
UAV motion model
-
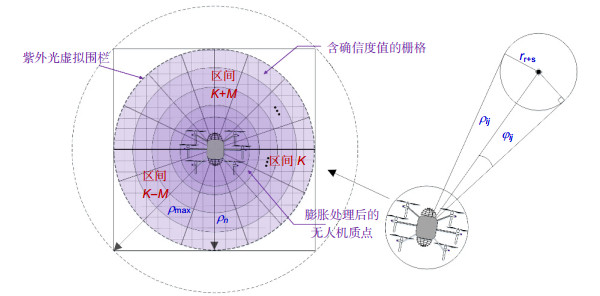
Figure 3.
Wireless ultraviolet virtual fence histogram
-
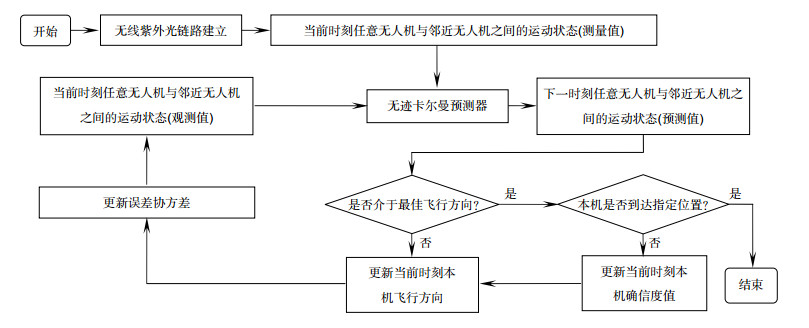
Figure 4.
Avoidance flow chart based on wireless ultraviolet
-
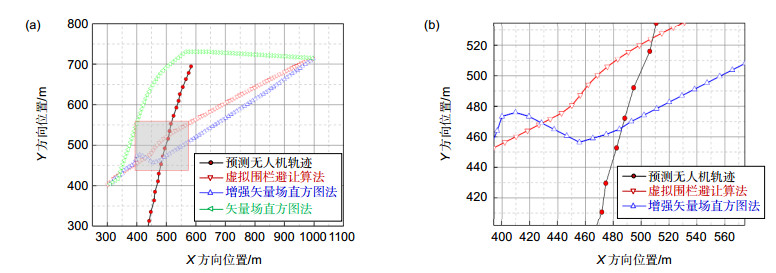
Figure 5.
(a) Local avoidance track in the scene 1; (b) Partial enlargement of the avoidance trajectory in the scene 1
-
Figure 6.
(a) Local evasive trajectory in scene 2; (b) Partial enlargement of the escaping trajectory in scene 2
-
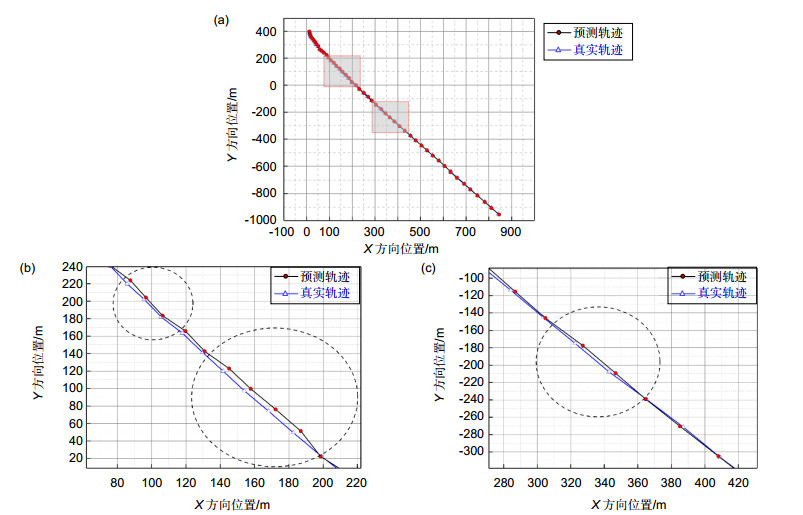
Figure 7.
(a) Predicted trajectory in scene 1; (b) First partial enlargement; (c) Second partial enlargement
-
Figure 8.
(a) Predicted trajectory in scene 2; (b) First partial enlargement; (c) Second partial enlargement


