
 E-mail Alert
E-mail Alert RSS
RSS
| Citation: |
Huang Qian, Wang Zeyong, Li Jinlong, et al. Automatic recognition of bolts on locomotive running gear based on laser scanner 3D measurement[J]. Opto-Electronic Engineering, 2018, 45(1): 170532. doi: 10.12086/oee.2018.170532

|
Automatic recognition of bolts on locomotive running gear based on laser scanner 3D measurement
-
Abstract
The locomotive running gear 3D point cloud data are obtained by line-structured laser scanner, and the bolts on the locomotive running gear under the 3D point cloud data are recognized and located automatically. Firstly, fast point feature histograms (FPFHs) of the key points are calculated to describe the 3D features, and the target region is matched with the preselected bolt template. Then, K-means clustering is carried out on the weighted match point set using uniform seed points. Finally, the Hough transform method is used to establish a strict classifier for the clusters, and the existence and precise position of the bolts are determined. The experimental results verify the effectiveness of the proposed method. -

-
References
[1] Pengdry J B. Negative refraction makes a perfect lens[J]. Physical Review Letters, 2000, 85(18): 3966-3969. doi: 10.1103/PhysRevLett.85.3966 [2] 张滋黎, 邾继贵, 周虎, 等.一种新型自动激光经纬仪引导跟踪方法[J].光电工程, 2010, 37(4): 1-7. Zhang Z L, Zhu J G, Zhou H, et al. Guidance tracking method of a new automatic laser theodolite system[J]. Opto-Electronic Engineering, 2010, 37(4): 1-7. [3] Yamamoto S. Development of inspection robot for nuclear power plant[C]//Proceedings of 1992 IEEE International Conference on Robotics and Automation, Nice, France, 1992, 2: 1559-1566. [4] Wang G H, Hu Z Y, Wu F C, et al. Implementation and experimental study on fast object modeling based on multiple structured stripes[J]. Optics and Lasers in Engineering, 2004, 42(6): 627-638. doi: 10.1016/j.optlaseng.2004.05.008 [5] 龙玺, 钟约先, 李仁举, 等.结构光三维扫描测量的三维拼接技术[J].清华大学学报(自然科学版), 2002, 42(4): 477-480. Long X, Zhong Y X, Li R J, et al. 3-D surface integration in structured light 3-D scanning[J]. Journal of Tsinghua University (Science & Technology), 2002, 42(4): 477-480. [6] Johnson A. Spin-images: a representation for 3-D surface matching[D]. Pittsburgh, PA: Carnegie Mellon University, 1997. [7] Halma A, Haar F T, Bovenkamp E, et al. Single spin image-ICP matching for efficient 3D object recognition[C]//Proceedings of the ACM Workshop on 3D Object Retrieval, 2010: 21-26. https://dl.acm.org/citation.cfm?id=1877814 [8] Wang X L, Liu Y, Zha H B. Intrinsic spin images: a subspace decomposition approach to understanding 3D deformable shapes[C]//Proceedings of the 5th International Symposium 3D Data Processing, Visualization and Transmission, 2010. [9] Guarnieri A, Vettore A, Camarda M, et al. Automatic registration of large range datasets with spin-images[J]. Journal of Cultural Heritage, 2011, 12(4): 476-484. doi: 10.1016/j.culher.2011.03.010 [10] Chua C S, Han F, Ho Y K. 3D human face recognition using point signature[C]//Proceedings of the 4th IEEE International Conference on Automatic Face and Gesture Recognition, 2000: 233-238. http://ieeexplore.ieee.org/abstract/document/840640/ [11] Gelfand N, Mitra N J, Guibas L J, et al. Robust global registration[C]//Proceedings of the third Eurographics Symposium on Geometry Processing, 2005: 197. [12] Rusu R B, Marton Z C, Blodow N, et al. Persistent point feature histograms for 3D point clouds[C]//Proceedings of the 10th International Conference on Intelligent Autonomous Systems, 2008. https://books.glgoo.com/books?hl=zh-CN&lr=&id=0CgdTrB1AEIC&oi=fnd&pg=PA119&dq=+Persistent+point+feature+histograms+for+3D+point+clouds&ots=joh_GsjLuk&sig=WfNcHDM0qQVX1gqUAgkHNSAPdN4 [13] Rusu R B, Blodow N, Marton Z C, et al. Aligning point cloud views using persistent feature histograms[C]//Proceedings of 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2008: 3384-3391. http://ieeexplore.ieee.org/abstract/document/4650967/ [14] Rusu R B, Blodow N, Beetz M. Fast Point Feature Histograms (FPFH) for 3D registration[C]//Proceedings of 2009 IEEE International Conference on Robotics and Automation, 2009: 3212-3217. http://ieeexplore.ieee.org/abstract/document/5152473/ [15] Rusu R B, Holzbach A, Blodow N, et al. Fast geometric point labeling using conditional random fields[C]//Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems, 2009: 7-12. http://ieeexplore.ieee.org/abstract/document/5354763/ [16] Zhong Y. Intrinsic shape signatures: a shape descriptor for 3D object recognition[C]//Proceedings of the 12th International Conference on Computer Vision Workshops, 2009: 689-696. http://ieeexplore.ieee.org/abstract/document/5457637/ [17] Tamura S, Kim E K, Close R, et al. Error correction in laser scanner three-dimensional measurement by two-axis model and coarse-fine parameter search[J]. Pattern Recognition, 1994, 27(3): 331-338. doi: 10.1016/0031-3203(94)90111-2 [18] 范生宏, 刘昌儒, 亓晓彤, 等.结构光三维测量系统精度分析及验证[J].光电工程, 2014, 41(5): 52-56. Fan S H, Liu C R, Qi X T, et al. Accuracy analysis and verification of structured light 3D measurement system[J]. Opto-Electronic Engineering, 2014, 41(5): 52-56. [19] 黄风山, 陈丽, 任有志, 等.连铸坯线结构光视觉定重方法[J].光电工程, 2015, 42(8): 27-33. Huang F S, Chen L, Ren Y Z, et al. A vision weight method of billet based on linear structure laser[J]. Opto-Electronic Engineering, 2015, 42(8): 27-33. [20] Jain A K. Data clustering: 50 years beyond K-means[J]. Pattern Recognition Letters, 2010, 31(8): 651-666. doi: 10.1016/j.patrec.2009.09.011 -
Overview

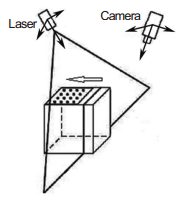
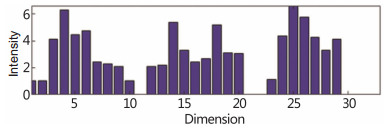
Overview: The detection of locomotive running gear is an important part of railway safety inspection. However, the automatic detection based on the two-dimensional image cannot directly get the three-dimensional size of the object, and is easy to be affected by light, oil, shooting angle and so on. Therefore, it is of great practical significance to study the locomotive running gear inspection system based on three-dimensional measurement technology. Line-structured laser scanner is one of the most common 3D laser scanner. In the automatic detection of locomotive based on the 3D laser scanner, how to recognize and locate the bolts on the locomotive running gear under the 3D point cloud data is one of the research focuses. In this paper, the locomotive running gear 3D point cloud data are obtained by line-structured laser scanner, and the bolts on the locomotive running gear under the 3D point cloud data are recognized and located automatically. Firstly, an appropriate bolt in the data is selected as the template, and both in the template and target regions, key points are extracted by Intrinsic shape signatures (ISS) algorithm, and Fast point feature histograms (FPFHs) of the key points are calculated to describe the 3D features. Then, the target region is matched with the preselected bolt template on basis of the Euclidean distance between FPFHs, and points in the match point set are weighted by the key points of the bolt template they have matched. Then, K-means clustering is carried out on the weighted match point set using uniform seed points, and the clusters are initially screened based on the number of points. The point cloud is divided into many blocks according to the size of bolts, and the vertices of each block are selected as the cluster seeds. Finally, the Hough transform method is used to establish a strict classifier for the clusters. The key points on the bolts are treated as several fuzzy circles of a fixed radius, so the existence and location of the bolt can be judged by Hough transformation of each cluster. An experiment is carried out for validation. In the experiment, all five bolts of the same type in the target area are successfully marked. The experimental results verify the effectiveness of the proposed method. As the three-dimensional data can directly get the target depth information, the proposed method has a good application prospect, which is expected to be a useful complement to the online railway safety inspection system.
-
Access History

Export File
Citation
Huang Qian, Wang Zeyong, Li Jinlong, et al. Automatic recognition of bolts on locomotive running gear based on laser scanner 3D measurement[J]. Opto-Electronic Engineering, 2018, 45(1): 170532. doi: 10.12086/oee.2018.170532
Format
Content
 DownLoad:
DownLoad:

-
Figure 1.
Basic principle of line-structured laser scanner
-
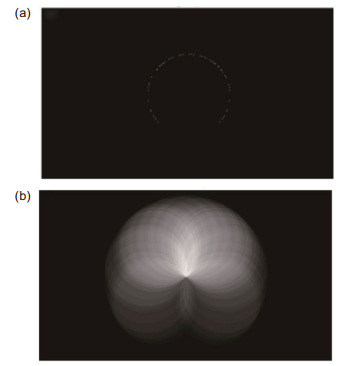
Figure 2.
One of the FPFH feature descriptors
-
Figure 3.
Principle of Hough transform. (a) Image space; (b) Parameter space
-
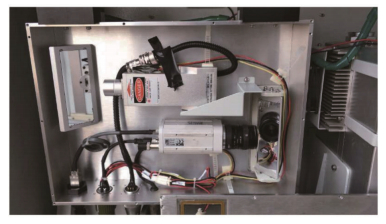
Figure 4.
3D line-structured laser scanner
-
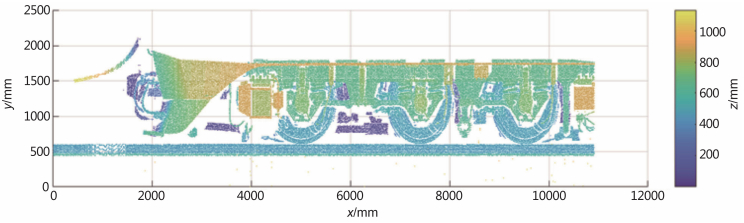
Figure 5.
Test data
-
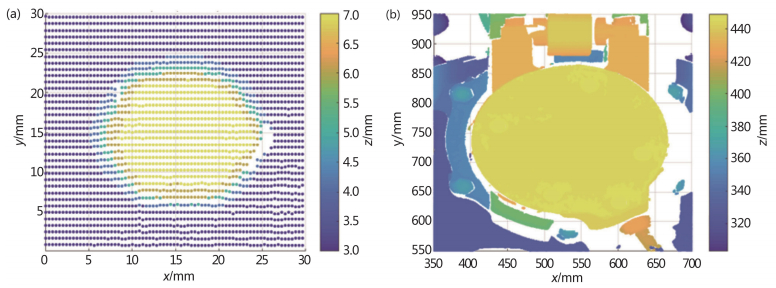
Figure 6.
The point cloud data for the template and target. (a) Point cloud data for template; (b) Point cloud data for target
-
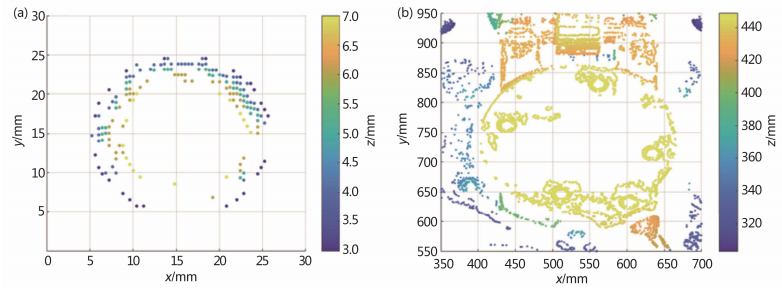
Figure 7.
Key points extraction. (a) Key points extraction in template; (b) Key points extraction in target
-
Figure 8.
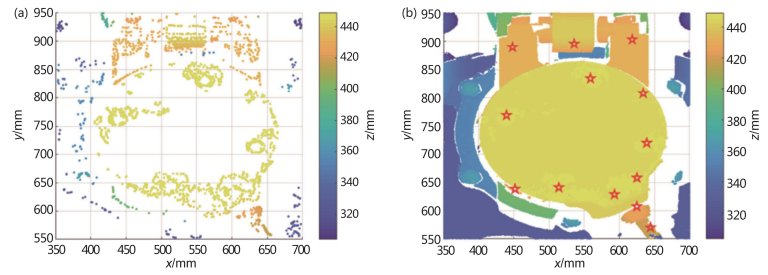
Results of match and pre-recognition. (a) Match point set; (b) Pre-recognition of bolts
-
Figure 9.
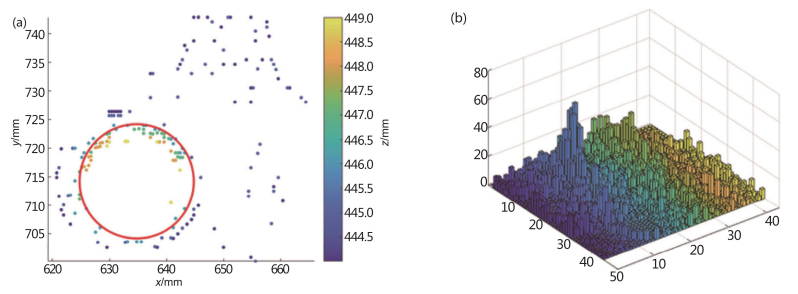
Hough transform process. (a) A cluster of matching points; (b) Hough matrix
-
Figure 10.
Result of bolt recognition and localization. (a) Recognition of bolts in the target; (b) Grayscale image of the target area


