
 E-mail Alert
E-mail Alert RSS
RSS
| Citation: |
Cai Huaiyu, Ding Lei, Huang Zhanhua, et al. An accurate calibration method of the ball screen projection point targets tracking system[J]. Opto-Electronic Engineering, 2018, 45(8): 170565. doi: 10.12086/oee.2018.170656

|
An accurate calibration method of the ball screen projection point targets tracking system
-
Abstract
This paper proposes an accurately calibration method which is suitable for the scene, on the issues of multiple subsystems relative position detecting complexity in a ball screen projection point targets tracking system. Take the ball screen as the world coordinate system, and mark center of the ball by subsystem to implement coordinate transformation of the projection point among the subsystems. The author studies the calibration principle and the projecting method, and provides a solution. Through Matlab simulation analysis of the error factor, simulated results show that the ball screen calibration precision can be effectively improved by reducing the distance between the subsystem and its center or perfecting the projection point spatial distribution. Eventually, this paper presents a calibration method based on the TLS and designs a virtual sphere, calibration device and finishes the experiments. The experimental results meet the demand of quick and accurate site calibration. -

-
References
[1] 周立伟, 刘玉岩.目标识别与探测[M].北京:北京理工大学出版社, 2002. [2] 董明. XX目标坐标测定仪伺服控制系统的设计与实现[D]. 南京: 南京理工大学, 2012. http://cdmd.cnki.com.cn/Article/CDMD-10288-1012319925.htm [3] 孙鑫, 白加光, 王忠厚.球幕投影光学系统的设计与研究[J].光子学报, 2006, 35(11): 1766-1769. Sun X, Bai J G, Wang Z H. Design and study of the dome-screen projector optical system[J]. Acta Photonica Sinica, 2006, 35(11): 1766-1769. [4] 黄战华, 张超, 蔡怀宇, 等.基于二轴转台的运动目标球幕投影联合控制[J].光电工程, 2014, 41(9): 32-37. doi: 10.3969/j.issn.1003-501X.2014.09.006 Huang Z H, Zhang C, Cai H Y, et al. The research of joint control algorithm of moving target dome projection based on two-axis turntable[J]. Opto-Electronic Engineering, 2014, 41(9): 32-37. doi: 10.3969/j.issn.1003-501X.2014.09.006 [5] 高教波, 李建军, 孙治家, 等.多波长激光复合点目标运动模拟[J].应用光学, 2011, 32(3): 562-567. Gao J B, Li J J, Sun Z J, et al. Simulation of multi-wavelength laser composite point target motion[J]. Journal of Applied Optics, 2011, 32(3): 562-567. [6] 官云兰. 地面三维激光扫描数据处理中的若干问题研究[D]. 上海: 同济大学, 2008. http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=Y1450132 [7] 鲁铁定, 周世健, 张立亭, 等.基于整体最小二乘的地面激光扫描标靶球定位方法[J].大地测量与地球动力学, 2009, 29(4): 102-105. Lu T D, Zhou S J, Zhang L T, et al. Sphere target fixing of point cloud data based on TLS[J]. Journal of Geodesy and Geodynamics, 2009, 29(4): 102-105. [8] 陈玮娴, 陈义, 袁庆, 等.加权总体最小二乘在三维激光标靶拟合中的应用[J].大地测量与地球动力学, 2010, 30(5): 90-96. Chen W X, Chen Y, Yuan Q, et al. Application of weighted total least-squares to target fitting of three-dimensional laser scanning[J]. Journal of Geodesy and Geodynamics, 2010, 30(5): 90-96. [9] Jazaeri S, Amiri-Simkooei A R, Sharifi M A. Iterative algorithm for weighted total least squares adjustment[J]. Survey Review, 2014, 46(334): 19-27. doi: 10.1179/1752270613Y.0000000052 [10] 王乐洋, 陈汉清, 林永达, 等.利用稳健WTLS方法进行三维激光扫描标靶球定位[J].大地测量与地球动力学, 2016, 36(8): 745-749. Wang L Y, Chen H Q, Lin Y D, et al. Spherical target positioning of 3D laser scanning by using robust WTLS method[J]. Journal of Geodesy and Geodynamics, 2016, 36(8): 745-749. [11] 黄维彬.近代平差理论及其应用[M].北京:解放军出版社, 1992. [12] 魏木生.广义最小二乘问题的理论和计算[M].北京:科技出版社, 2006. [13] Muellner J. Multispectral Target Simulation Dome for Hardware-in-the-loop Simulation of fire Control and Optronic Seeker Systems[M]. Orlando: SPIE, 2004, 5408: 22-32. [14] Schaffrin B. A note on constrained total least-squares estimation[J]. Linear Algebra and Its Applications, 2006, 417(1): 245-258. doi: 10.1016/j.laa.2006.03.044 [15] 张皓琳, 林嘉睿, 邾继贵.三维坐标转换精度及其影响因素的研究[J].光电工程, 2012, 39(10): 26-31. doi: 10.3969/j.issn.1003-501X.2012.10.005 Zhang H L, Lin J R, Zhu J G. Three-dimensional coordinate transformation accuracy and its influencing factors[J]. Opto-Electronic Engineering, 2012, 39(10): 26-31. doi: 10.3969/j.issn.1003-501X.2012.10.005 -
Overview

Overview: The ball screen projection point targets tracking system is a hardware-in-loop simulation system, which is used for testing the tracking and hitting performance of tanks or artillery. The testing can be achieved completely under laboratory, so it has become a popular research topic. It is multiple subsystems coordination work, so the data needs convert into the same coordinate system to give the control and evaluation by frequent coordinate transformation between the subsystems. As important parameters of coordinate transformation, the precision and maneuverability of the calibration result of subsystems relative position will affect the using range and test conditions of the simulation system. Generally, the distance date between the subsystems and the ball are measured by man or directly adopted the design scheme. However, the error is unavoidable in the field installation process. The relative positional relation cannot be exactly the same as the design scheme. In addition, the center of the ball screen is a virtual point and the manual measurement has a large error. The relevant researches aim at a mature measurement system that can acquire a large number of point clouds at a time and have high data measurement accuracy, such as the three-dimensional laser scanner. Only the accidental errors are analyzed and the impact of the calibration scheme is not taken into account on the calibration results. Therefore, these researches proposed optimization scheme is not applicable for the field calibration with small quantity and limited precision. This paper proposes an accurately calibration method, which is suitable for the scene on the issues of multiple subsystems relative position detecting complexity in a ball screen projection point targets tracking system. Take the ball screen as the world coordinate system, and mark center of the ball by subsystem to implement coordinate transformation of the projection point among the subsystems. The author studies the calibration principle and the projecting method, and provides a G-M solution model for the center of the ball screen in a calibration system coordinate system. Through Matlab simulation analysis of the error factor, simulated results show that the ball screen calibration precision can be effectively improved by reducing the distance between the subsystem and its center or perfecting the projection point spatial distribution. Eventually, this paper presents a calibration method based on the TLS and designs a virtual sphere, calibration device and finishes the experiments. The accuracy of the calibration is 0.44%, and the results meet the demand of quick and accurate site calibration.
-
Access History
Figures(11)
Tables(1)
Article Metrics

Export File
Citation
Cai Huaiyu, Ding Lei, Huang Zhanhua, et al. An accurate calibration method of the ball screen projection point targets tracking system[J]. Opto-Electronic Engineering, 2018, 45(8): 170565. doi: 10.12086/oee.2018.170656
Format
Content
 DownLoad:
DownLoad:
-
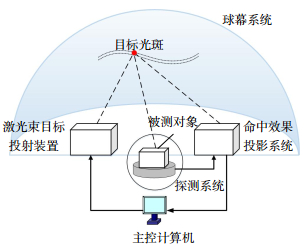
Figure 1.
Point target control and projection system structure
-
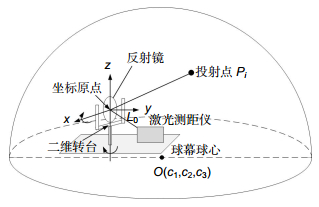
Figure 2.
The model of projection system and ball screen system
-
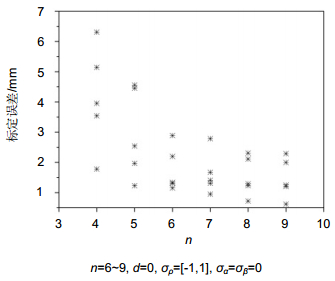
Figure 3.
The influence of point number on the calibration accuracy
-
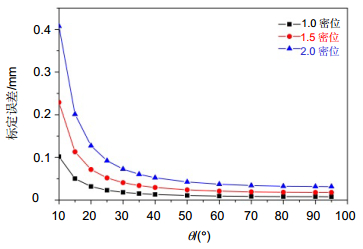
Figure 4.
The influence of the angle between the fixed points on the calibration accuracy
-
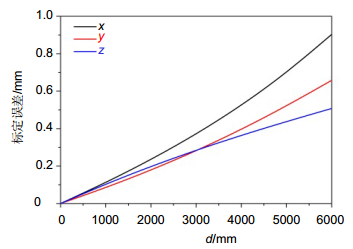
Figure 5.
The influence of d on the calibration accuracy
-
Figure 6.
The influence of azimuth error
-
Figure 7.
The influence of pitching error
-
Figure 8.
The influence of distance error
-
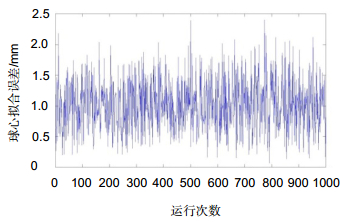
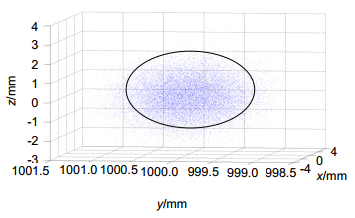
Figure 9.
The influence of multivariate error
-
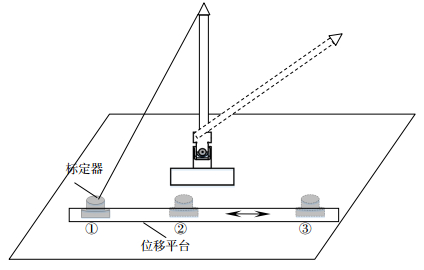
Figure 10.
Experimental schematic diagram
-
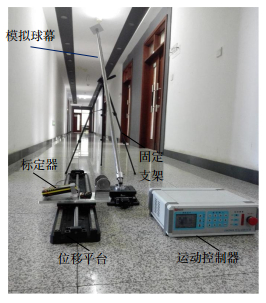
Figure 11.
The experimental device


