
 E-mail Alert
E-mail Alert RSS
RSS
| Citation: |
Liu Hui, Peng Li, Wen Jiwei. Multi-occluded pedestrian real-time detection algorithm based on preprocessing R-FCN[J]. Opto-Electronic Engineering, 2019, 46(9): 180606. doi: 10.12086/oee.2019.180606

|
Multi-occluded pedestrian real-time detection algorithm based on preprocessing R-FCN
-
Abstract
One of main challenges of driver assistance systems is to detect multi-occluded pedestrians in real-time in complicated scenes, to reduce the number of traffic accidents. In order to improve the accuracy and speed of detection system, we proposed a real-time multi-occluded pedestrian detection algorithm based on R-FCN. RoI Align layer was introduced to solve misalignments between the feature map and RoI of original images. A separable convolution was optimized to reduce the dimensions of position-sensitive score maps, to improve the detection speed. For occluded pedestrians, a multi-scale context algorithm is proposed, which adopt a local competition mechanism for adaptive context scale selection. For low visibility of the body occlusion, deformable RoI pooling layers were introduced to expand the pooled area of the body model. Finally, in order to reduce redundant information in the video sequence, Seq-NMS algorithm is used to replace traditional NMS algorithm. The experiments have shown that there is low detection error on the datasets Caltech and ETH, the accuracy of our algorithm is better than that of the detection algorithms in the sets, works particularly well with occluded pedestrians. -

-
References
[1] Dollar P, Wojek C, Schiele B, et al. Pedestrian detection: an Evaluation of the State of the art[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2012, 34(4): 743–761. doi: 10.1109/TPAMI.2011.155 [2] Wang X Y, Han T X, Yan S C. An HOG-LBP human detector with partial occlusion handling[C]//Proceedings of the 12th IEEE International Conference on Computer Vision, 2009: 32–39. http://ieeexplore.ieee.org/xpls/icp.jsp?arnumber=5459207 [3] Dai J F, Li Y, He K M, et al. R-FCN: object detection via region-based fully convolutional networks[C]//Proceedings of the 30th Conference on Neural Information Processing Systems, 2016: 379–387. http://www.researchgate.net/publication/303409473_R-FCN_Object_Detection_via_Region-based_Fully_Convolutional_Networks [4] 王科俊, 赵彦东, 邢向磊.深度学习在无人驾驶汽车领域应用的研究进展[J].智能系统学报, 2018, 13(1): 55–69. Wang K J, Zhao Y D, Xing X L. Deep learning in driverless vehicles[J]. CAAI Transactions on Intelligent Systems, 2018, 13(1): 55–69. [5] 王正来, 黄敏, 朱启兵, 等.基于深度卷积神经网络的运动目标光流检测方法[J].光电工程, 2018, 45(8): 180027. Wang Z L, Huang M, Zhu Q B, et al. The optical flow detection method of moving target using deep convolution neural network[J]. Opto-Electronic Engineering, 2018, 45(8): 180027. [6] Liu W, Anguelov D, Erhan D, et al. SSD: single shot MultiBox detector[C]//Proceedings of the 14th European Conference on Computer Vision, 2016: 21–37. [7] Ren S Q, He K M, Girshick R, et al. Faster R-CNN: towards real-time object detection with region proposal networks[C]//Proceedings of the 28th International Conference on Neural Information Processing Systems, 2015: 91–99. http://www.tandfonline.com/servlet/linkout?suffix=CIT0014&dbid=8&doi=10.1080%2F2150704X.2018.1475770&key=27295650 [8] 程德强, 唐世轩, 冯晨晨, 等.改进的HOG-CLBC的行人检测方法[J].光电工程, 2018, 45(8): 180111. Cheng D Q, Tang S X, Feng C C, et al. Extended HOG-CLBC for pedstrain detection[J]. Opto-Electronic Engineering, 2018, 45(8): 180111. [9] Ouyang W L, Wang X G. Joint deep learning for pedestrian detection[C]//Proceedings of 2013 IEEE International Conference on Computer Vision, 2014: 2056–2063. http://www.researchgate.net/publication/261857512_Joint_Deep_Learning_for_Pedestrian_Detection [10] Tian Y L, Luo P, Wang X G, et al. Deep learning strong parts for pedestrian detection?[C]//Proceedings of 2015 IEEE International Conference on Computer Vision, 2015: 1904–1912. http://www.researchgate.net/publication/300412405_Deep_Learning_Strong_Parts_for_Pedestrian_Detection [11] Ouyang W L, Zeng X Y, Wang X G. Partial occlusion handling in pedestrian detection with a deep model[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2016, 26(11): 2123–2137. doi: 10.1109/TCSVT.2015.2501940 [12] Szegedy C, Vanhoucke V, Ioffe S, et al. Rethinking the inception architecture for computer vision[J]. arXiv: 1512.00567v3[cs.CV], 2015. [13] Han W, Khorrami P, Le Paine P, et al. Seq-NMS for video object detection[J]. arXiv: 1602.08465[cs.CV], 2016. [14] He K M, Zhang X Y, Ren S Q, et al. Deep residual learning for image recognition[C]//Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition, 2016: 770–778. http://www.tandfonline.com/servlet/linkout?suffix=CIT0020&dbid=16&doi=10.1080%2F15481603.2018.1426091&key=10.1109%2FCVPR.2016.90 [15] He K M, Gkioxari G, Dollár P, et al. Mask R-CNN[C]// Proceedings of 2017 IEEE International Conference on Computer Vision, 2017: 2980–2988. [16] Dai J F, Qi H Z, Xiong Y W, et al. Deformable convolutional networks[C]//Proceedings of 2017 IEEE International Conference on Computer Vision, 2017: 764–773. http://www.researchgate.net/publication/315463609_Deformable_Convolutional_Networks?ev=prf_high [17] Bell S, Zitnick C L, Bala K, et al. Inside-outside net: detecting objects in context with skip pooling and recurrent neural networks[C]//Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition, 2016: 2874–2883. [18] Cai Z W, Fan Q F, Feris R S, et al. A unified multi-scale deep convolutional neural network for fast object detection[C]//Proceedings of the 14th European Conference on Computer Vision, 2016: 354–370. [19] Goodfellow I J, Warde-Farley D, Mirza M, et al. Maxout networks[J]. JMLR WCP, 2013, 28(3): 1319–1327. [20] Zhang L L, Lin L, Liang X D, et al. Is faster R-CNN doing well for pedestrian detection?[C]//Proceedings of the 14th European Conference on Computer Vision, 2016: 443–457. http://link.springer.com/chapter/10.1007/978-3-319-46475-6_28 [21] Tian Y L, Luo P, Wang X G, et al. Pedestrian detection aided by deep learning semantic tasks[C]//Proceedings of 2015 IEEE Conference on Computer Vision and Pattern Recognition, 2015: 5079–5087. 10.1109/CVPR.2015.7299143 [22] Du X Z, El-Khamy M, Lee J, et al. Fused DNN: a deep neural network fusion approach to fast and robust pedestrian detection[C]//Proceedings of the 2017 IEEE Winter Conference on Applications of Computer Vision, 2017. 10.1109/WACV.2017.111 [23] Dollár P, Appel R, Belongie S, et al. Fast feature pyramids for object detection[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2014, 36(8): 1532–1545. doi: 10.1109/TPAMI.2014.2300479 [24] Nam W, Dollár P, Han J H. Local decorrelation for improved pedestrian detection[C]//Proceedings of the 27th International Conference on Neural Information Processing Systems, 2014: 424–432. https://www.researchgate.net/publication/319770161_Local_Decorrelation_for_Improved_Pedestrian_Detection -
Overview

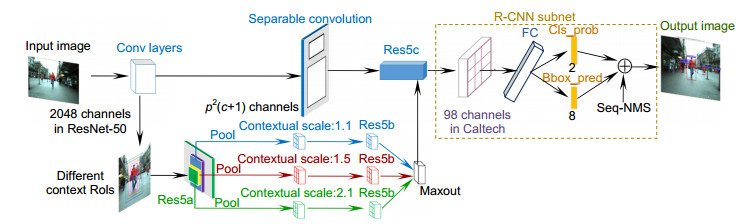
Overview: Pedestrian detection is a research hot in the fields of pattern recognition and machine learning. It is widely used in areas such as video surveillance, intelligent driving and robot navigation. Computer realizes pedestrian detection automatically, which can reduce the burden of people in a certain extent. With the development of deep learning theory, the convolutional neural network has made remarkable achievements in the field of pedestrian detection by improving the generation strategy of candidate regions and optimizing the network structure and training methods. Different from the usual object detection, pedestrian is a moving target and not a rigidity instance because of the change of occlusion and height. The methods base on feature extraction cannot meet the industrial requirements. So we choose a method base on convolutional neural network to achieve higher accuracy and real-time detection for multi-occluded pedestrians. The main work of pedestrian detection is to accurately draw the position coordinates of pedestrians in different scenarios and output the detection accuracy of the system. However, due to the complexity of the surrounding environment (such as multiple occlusion, weak illumination, etc.), the accuracy of the pedestrian detection system is greatly challenged. Compared with non-occluded pedestrians, multi-occluded pedestrians are easier to lose the detection information, and cause the decrease of pedestrian detection score below the threshold, thus missed the detection. In order to improve the detection accuracy and speed of multi-occlusion pedestrians in complex scenes, we propose a fast deformable full convolutional pedestrian detection network (called Fast D-FCN). Based on R-FCN, we introduced RoI Align layer to solve misalignments between the feature map and RoI of original images. To improve detection speed, we improved a separable convolution to reduce dimensions of position-sensitive score maps, put it on feature extraction layers of ResNet-50. For multi-occluded pedestrians, we proposed a multi-scale context in res5a of ResNet-50, which adopt a local competition mechanism for adaptive context scale selection. In the case of low visibility of the body occlusion, we introduced deformable RoI pooling layers to expand the pooled area of the body model in res5b of ResNet-50. Through the res5c layer, the channel feature vector of the fixed dimension, classification probability in the classification layer, and bounding box information in the regression layer are outputted. Finally, in order to reduce redundant information in the video sequence, we used Seq-NMS algorithm to replace traditional NMS algorithm. The experiments have shown that on the datasets Caltech, the detection error about part occlusion and heavy occlusion decrease 0.55% and 12.77% respectively compared to F-DNN. On the ETH dataset, our algorithm is better than the accuracy of other detection algorithms, and works particularly well with multi-occluded pedestrians.
-
Access History
Figures(7)
Tables(2)
Article Metrics

Export File
Citation
Liu Hui, Peng Li, Wen Jiwei. Multi-occluded pedestrian real-time detection algorithm based on preprocessing R-FCN[J]. Opto-Electronic Engineering, 2019, 46(9): 180606. doi: 10.12086/oee.2019.180606
Format
Content
 DownLoad:
DownLoad:



-
Figure 1.
Schematic of the network structure
-
Figure 2.
Schematic of the R-FCN structure
-
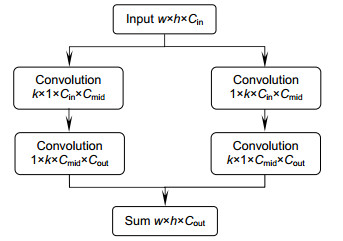
Figure 3.
Separable convolution performs k×1 and 1× k convolution
-
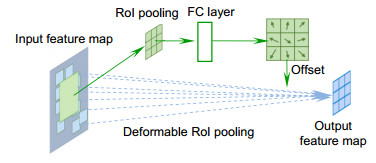
Figure 4.
Illustration of 3×3 deformable RoI pooling
-
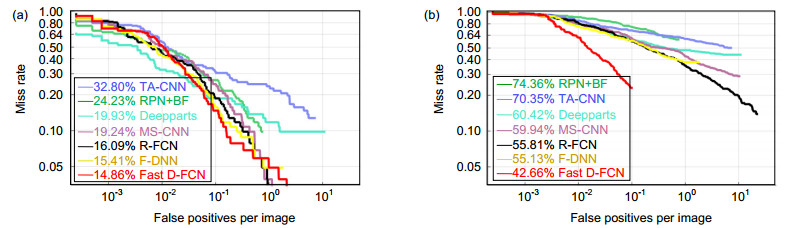
Figure 5.
Comparison results on the Caltech bench-mark. (a) Part-occlusion; (b) Heavy-occlusion
-
Figure 6.
Results on the ETH benchmark
-
Figure 7.
Test result carried out by the algorithm


