
 E-mail Alert
E-mail Alert RSS
RSS
| Citation: |
Cheng W, Chen Z B, Li Q Q, et al. Multiple object tracking with aligned spatial-temporal feature[J]. Opto-Electron Eng, 2023, 50(6): 230009. doi: 10.12086/oee.2023.230009

|
Multiple object tracking with aligned spatial-temporal feature
-
Abstract
Multiple object tracking (MOT) is an important task in computer vision. Most of the MOT methods improve object detection and data association, usually ignoring the correlation between different frames. They don’t make good use of the temporal information in the video, which makes the tracking performance significantly degraded in motion blur, occlusion, and small target scenes. In order to solve these problems, this paper proposes a multiple object tracking method with the aligned spatial-temporal feature. First, the convolutional gated recurrent unit (ConvGRU) is introduced to encode the spatial-temporal information of the object in the video; By considering the whole history frame sequence, this structure effectively extracts the spatial-temporal information to enhance the feature representation. Then, the feature alignment module is designed to ensure the time consistency between the historical frame information and the current frame information to reduce the false detection rate. Finally, this paper tests on MOT17 and MOT20 datasets, and multiple object tracking accuracy (MOTA) values are 74.2 and 67.4, respectively, which is increased by 0.5 and 5.6 compared with the baseline FairMOT method. Our identification F1 score (IDF1) values are 73.9 and 70.6, respectively, which are increased by 1.6 and 3.3 compared with the baseline FairMOT method. In addition, the qualitative and quantitative experimental results show that the overall tracking performance of this method is better than that of most of the current advanced methods.-
Keywords:
- multiple object tracking /
- spatial-temporal feature /
- ConvGRU /
- time consistency /
- feature alignment
-

-
References
[1] Ciaparrone G, Sánchez F L, Tabik S, et al. Deep learning in video multi-object tracking: a survey[J]. Neurocomputing, 2020, 381: 61−88. doi: 10.1016/j.neucom.2019.11.023 [2] Bewley A, Ge Z Y, Ott L, et al. Simple online and realtime tracking[C]//2016 IEEE International Conference on Image Processing (ICIP), 2016: 3464–3468. https://doi.org/10.1109/ICIP.2016.7533003. [3] Wojke N, Bewley A, Paulus D. Simple online and realtime tracking with a deep association metric[C]//2017 IEEE International Conference on Image Processing, 2018: 3645–3649. https://doi.org/10.1109/ICIP.2017.8296962. [4] 鄂贵, 王永雄. 基于R-FCN框架的多候选关联在线多目标跟踪[J]. 光电工程, 2020, 47(1): 190136. doi: 10.12086/oee.2020.190136 E G, Wang Y X. Multi-candidate association online multi-target tracking based on R-FCN framework[J]. Opto-Electron Eng, 2020, 47(1): 190136. doi: 10.12086/oee.2020.190136 [5] Berclaz J, Fleuret F, Fua P. Robust people tracking with global trajectory optimization[C]//2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR'06), 2006: 744–750. https://doi.org/10.1109/CVPR.2006.258. [6] Pirsiavash H, Ramanan D, Fowlkes C C. Globally-optimal greedy algorithms for tracking a variable number of objects[C]//CVPR 2011, 2011: 1201–1208. https://doi.org/10.1109/CVPR.2011.5995604. [7] Brasó G, Leal-Taixé L. Learning a neural solver for multiple object tracking[C]//Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020: 6246–6256. https://doi.org/10.1109/CVPR42600.2020.00628. [8] Xu J R, Cao Y, Zhang Z, et al. Spatial-temporal relation networks for multi-object tracking[C]//Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision, 2019: 3987–3997. https://doi.org/10.1109/ICCV.2019.00409. [9] Wang Z D, Zheng L, Liu Y X, et al. Towards real-time multi-object tracking[C]//Proceedings of the 16th European Conference on Computer Vision, 2020: 107–122. https://doi.org/10.1007/978-3-030-58621-8_7. [10] Zhang Y F, Wang C Y, Wang X G, et al. FairMOT: On the fairness of detection and re-identification in multiple object tracking[J]. Int J Comput Vision, 2021, 129(11): 3069−3087. doi: 10.1007/s11263-021-01513-4 [11] Bergmann P, Meinhardt T, Leal-Taixé L. Tracking without bells and whistles[C]//Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision, 2019: 941–951. https://doi.org/10.1109/ICCV.2019.00103. [12] Zhou X Y, Koltun V, Krähenbühl P. Tracking objects as points[C]//Proceedings of the 16th European Conference on Computer Vision, 2020: 474–490. https://doi.org/10.1007/978-3-030-58548-8_28. [13] Carion N, Massa F, Synnaeve G, et al. End-to-end object detection with transformers[C]//Proceedings of the 16th European Conference on Computer Vision, 2020: 213–229. https://doi.org/10.1007/978-3-030-58452-8_13. [14] Sun P Z, Cao J K, Jiang Y, et al. Transtrack: Multiple object tracking with transformer[Z]. arXiv: 2012.15460, 2020. https://arxiv.org/abs/2012.15460. [15] Meinhardt T, Kirillov A, Leal-Taixé L, et al. TrackFormer: Multi-object tracking with transformers[C]//Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022: 8834–8844. https://doi.org/10.1109/CVPR52688.2022.00864. [16] Zeng F G, Dong B, Zhang Y A, et al. MOTR: End-to-end multiple-object tracking with transformer[C]//Proceedings of the 17th European Conference on Computer Vision, 2022: 659–675. https://doi.org/10.1007/978-3-031-19812-0_38. [17] Vaswani A, Shazeer N, Parmar N, et al. Attention is all you need[C]//Proceedings of the 31st International Conference on Neural Information Processing Systems, 2017: 6000–6010. [18] Ballas N, Yao L, Pal C, et al. Delving deeper into convolutional networks for learning video representations[C]//Proceedings of the 4th International Conference on Learning Representations, 2015. [19] Yu F W, Li W B, Li Q Q, et al. POI: Multiple object tracking with high performance detection and appearance feature[C]//Proceedings of the European Conference on Computer Vision, 2016: 36–42. https://doi.org/10.1007/978-3-319-48881-3_3. [20] Liang C, Zhang Z P, Zhou X, et al. Rethinking the competition between detection and ReID in multiobject tracking[J]. IEEE Trans Image Process, 2022, 31: 3182−3196. doi: 10.1109/TIP.2022.3165376 [21] Yu E, Li Z L, Han S D, et al. RelationTrack: Relation-aware multiple object tracking with decoupled representation[J]. IEEE Trans Multimedia, 2022. https://doi.org/10.1109/TMM.2022.3150169. [22] Wang Q, Zheng Y, Pan P, et al. Multiple object tracking with correlation learning[C]//Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021: 3875–3885. https://doi.org/10.1109/CVPR46437.2021.00387. [23] Tokmakov P, Li J, Burgard W, et al. Learning to track with object permanence[C]//Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision, 2021: 10840–10849. https://doi.org/10.1109/ICCV48922.2021.01068 [24] Welch G, Bishop G. An Introduction to the Kalman Filter[M]. Chapel Hill: University of North Carolina at Chapel Hill, 1995. [25] Kuhn H W. The Hungarian method for the assignment problem[J]. Naval Res Logist Q, 1955, 2(1–2): 83–97.https://doi.org/10.1002/nav.3800020109. [26] Peng J L, Wang C A, Wan F B, et al. Chained-tracker: Chaining paired attentive regression results for end-to-end joint multiple-object detection and tracking[C]//Proceedings of the 16th European Conference on Computer Vision, 2020: 145–161. https://doi.org/10.1007/978-3-030-58548-8_9. [27] Zheng L, Bie Z, Sun Y F, et al. MARS: A video benchmark for large-scale person re-identification[C]//Proceedings of the 14th European Conference on Computer Vision, 2016: 868–884. https://doi.org/10.1007/978-3-319-46466-4_52. [28] McLaughlin N, Del Rincon J M, Miller P. Recurrent convolutional network for video-based person re-identification[C]//Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition, 2016: 1325–1334. https://doi.org/10.1109/CVPR.2016.148. [29] Zhou Z, Huang Y, Wang W, et al. See the forest for the trees: Joint spatial and temporal recurrent neural networks for video-based person re-identification[C]//Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, 2017: 6776–6785. https://doi.org/10.1109/CVPR.2017.717. [30] Fu Y, Wang X Y, Wei Y C, et al. STA: Spatial-temporal attention for large-scale video-based person re-identification[C]//Proceedings of the 33rd AAAI Conference on Artificial Intelligence, 2019: 8287–8294. https://doi.org/10.1609/aaai.v33i01.33018287. [31] Li J N, Zhang S L, Huang T J. Multi-scale 3D convolution network for video based person re-identification[C]//Proceedings of the 33rd AAAI Conference on Artificial Intelligence, 2019: 8618–8625. https://doi.org/10.1609/aaai.v33i01.33018618. [32] 王迪聪, 白晨帅, 邬开俊. 基于深度学习的视频目标检测综述[J]. 计算机科学与探索, 2021, 15(9): 1563−1577. doi: 10.3778/j.issn.1673-9418.2103107 Wang D C, Bai C S, Wu K J. Survey of video object detection based on deep learning[J]. J Front Comput Sci Technol, 2021, 15(9): 1563−1577. doi: 10.3778/j.issn.1673-9418.2103107 [33] 陆康亮, 薛俊, 陶重犇. 融合空间掩膜预测与点云投影的多目标跟踪[J]. 光电工程, 2022, 49(9): 220024. doi: 10.12086/oee.2022.220024 Lu K L, Xue J, Tao C B. Multi target tracking based on spatial mask prediction and point cloud projection[J]. Opto-Electron Eng, 2022, 49(9): 220024. doi: 10.12086/oee.2022.220024 [34] Zhu X Z, Xiong Y W, Dai J F, et al. Deep feature flow for video recognition[C]//Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, 2017: 4141–4150. https://doi.org/10.1109/CVPR.2017.441. [35] Kang K, Ouyang W L, Li H S, et al. Object detection from video tubelets with convolutional neural networks[C]//Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition, 2016: 817–825. https://doi.org/10.1109/CVPR.2016.95. [36] Feichtenhofer C, Pinz A, Zisserman A. Detect to track and track to detect[C]//Proceedings of the 2017 IEEE International Conference on Computer Vision, 2017: 3057–3065. https://doi.org/10.1109/ICCV.2017.330. [37] Xiao F Y, Lee Y J. Video object detection with an aligned spatial-temporal memory[C]//Proceedings of the 15th European Conference on Computer Vision, 2018: 494–510. https://doi.org/10.1007/978-3-030-01237-3_30. [38] Yu F, Wang D Q, Shelhamer E, et al. Deep layer aggregation[C]//Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2018: 2403–2412. https://doi.org/10.1109/CVPR.2018.00255. [39] Pang B, Li Y Z, Zhang Y F, et al. TubeTK: adopting tubes to track multi-object in a one-step training model[C]//Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020: 6307–6317. https://doi.org/10.1109/CVPR42600.2020.00634. [40] Wu J J, Cao J L, Song L C, et al. Track to detect and segment: an online multi-object tracker[C]//Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021: 12347–12356. https://doi.org/10.1109/CVPR46437.2021.01217. [41] Pang J M, Qiu L L, Li X, et al. Quasi-dense similarity learning for multiple object tracking[C]//Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021: 164–173. https://doi.org/10.1109/CVPR46437.2021.00023. -
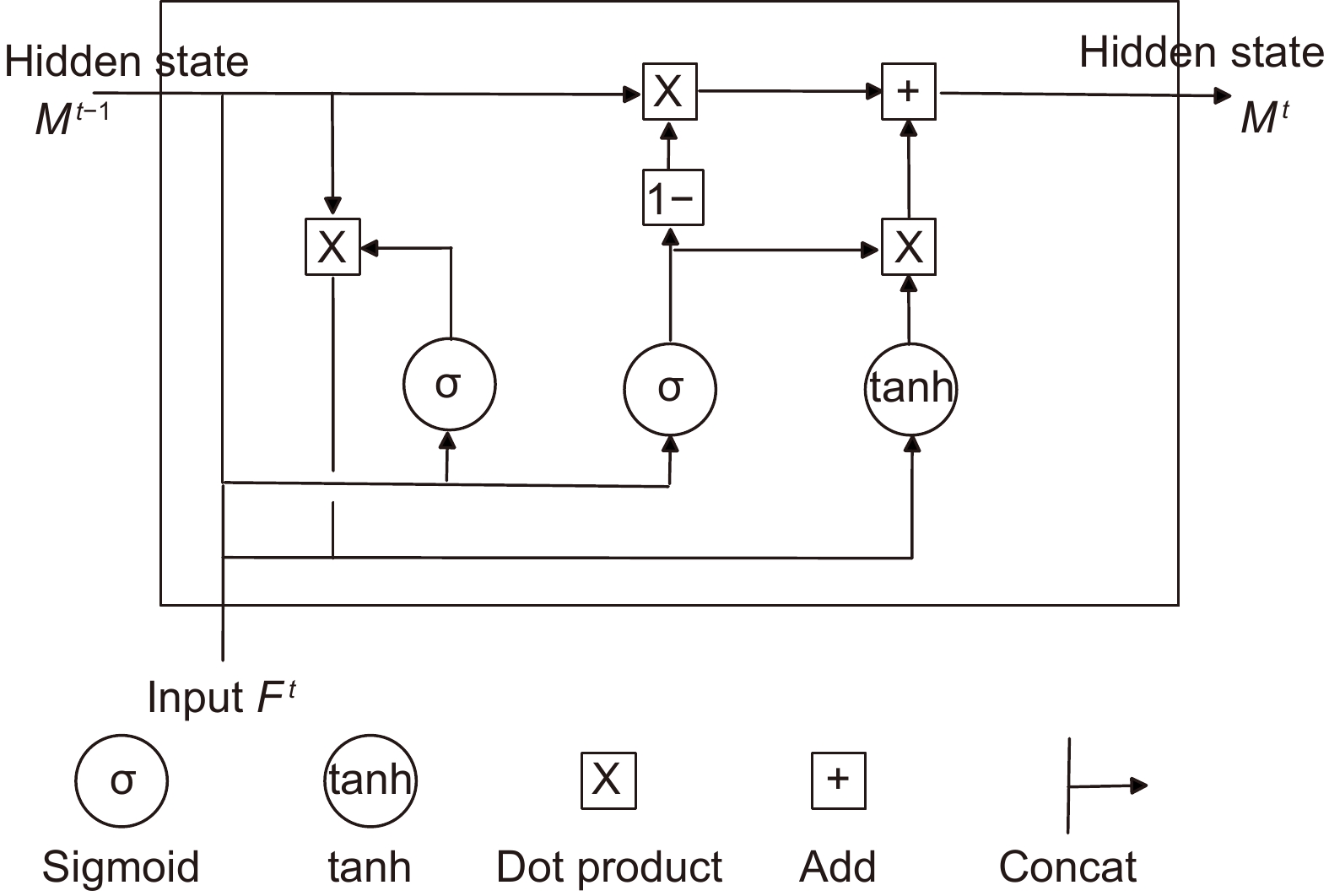
Overview
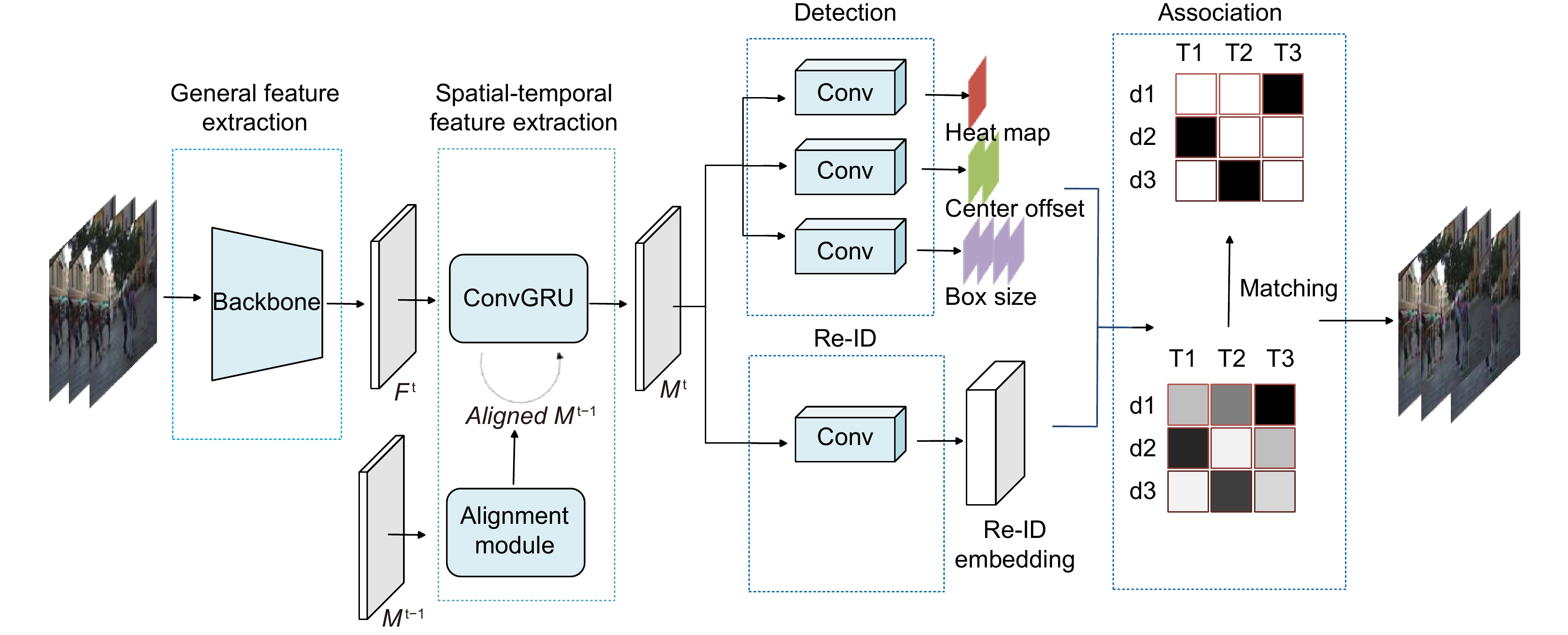
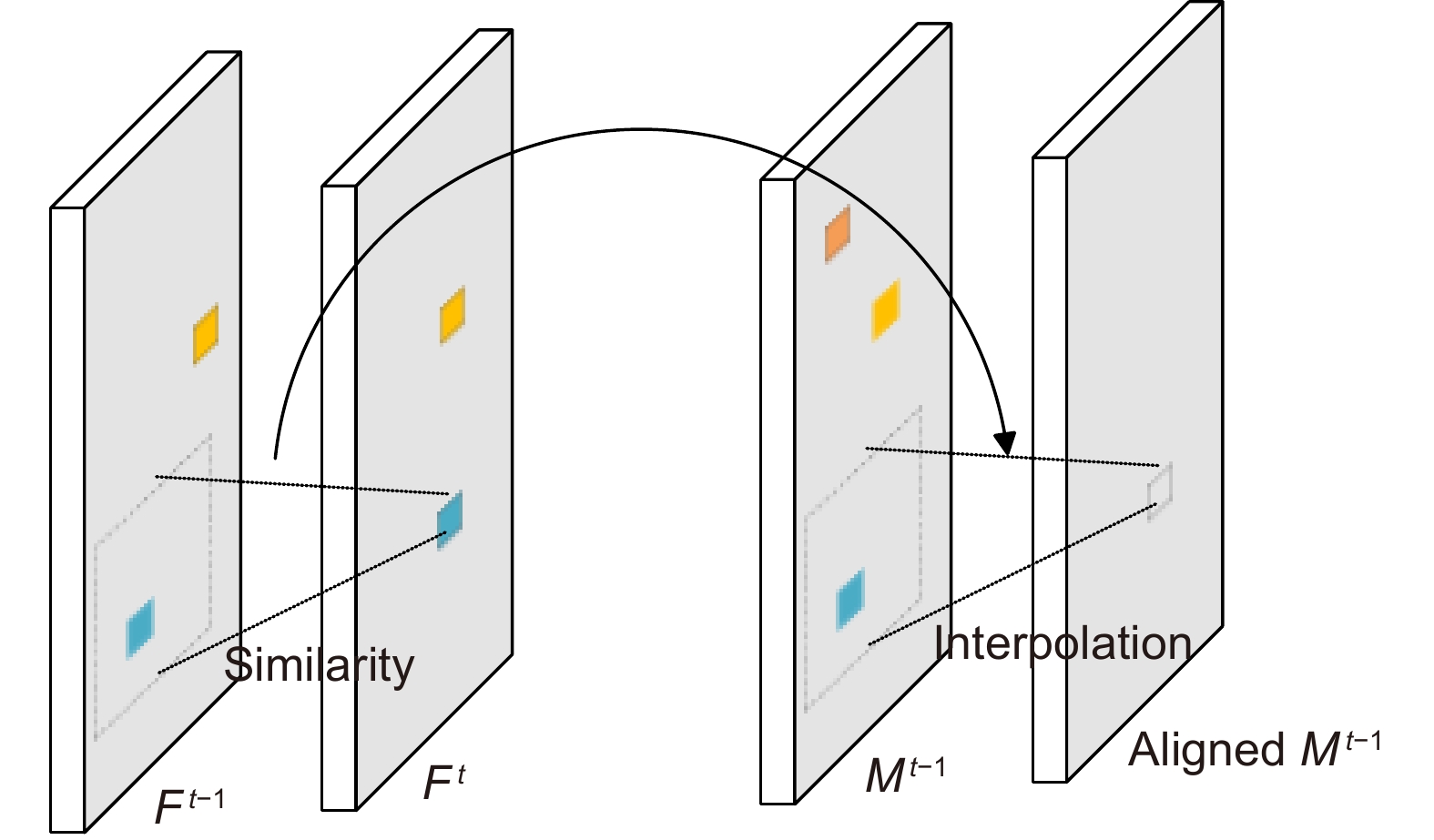
Multiple object tracking (MOT) is an important task in computer vision. It is widely used in the fields of surveillance video analysis and automatic driving. MOT is to locate multiple objects of interest, maintain the unique identification number (ID) of each object, and record continuous tracks. The difficulty of multi-target tracking is false positives (FP), false negatives (FN), ID switches (IDs), and the uncertainty of the target number. Most of the MOT methods improve object detection and data association, usually ignoring the correlation between different frames. Although some methods have tried to construct the correlation between different frames in recent years, they only stay in the adjacent frames and do not explicitly model the temporal information in the video. They don’t make good use of the temporal information in the video, which makes the tracking performance significantly degraded in motion blur, occlusion, and small target scenes. In order to solve these problems, this paper proposes a multiple object tracking method with the aligned spatial-temporal feature. First, the convolutional gated recurrent unit (ConvGRU) is introduced to encode the spatial-temporal information of the object in the video; By considering the whole history frame sequence, this structure effectively extracts the spatial-temporal information to enhance the feature representation. However, the target in the video is moving, and the spatial position of the target in the current frame is different from that in the previous frame, and ConvGRU is difficult to forget the spatial position of the target in the historical frame, thus overlaying the misaligned features, resulting in the spatial position of the target in the historical frame on the feature map has a high response, which makes the detector think that the target is still in the spatial position of the previous frame. Then, the feature alignment module is designed to ensure the time consistency between the historical frame information and the current frame information to reduce the false detection rate. Finally, this paper tests MOT17 and MOT20 datasets, and the multiple object tracking accuracy (MOTA) values are 74.2 and 67.4, respectively, which are increased by 0.5 and 5.6 compared with the baseline FairMOT method. Our identification F1 score (IDF1) value is 73.9 and 70.6, respectively, which is increased by 1.6 and 3.3 compared with the baseline FairMOT method. In addition, the qualitative and quantitative experimental results show that the overall tracking performance of this method is better than that of most of the current advanced methods.
-
Access History
Figures(6)
Tables(5)
Article Metrics

Export File
Citation
Cheng W, Chen Z B, Li Q Q, et al. Multiple object tracking with aligned spatial-temporal feature[J]. Opto-Electron Eng, 2023, 50(6): 230009. doi: 10.12086/oee.2023.230009
Format
Content
 DownLoad:
DownLoad:
-
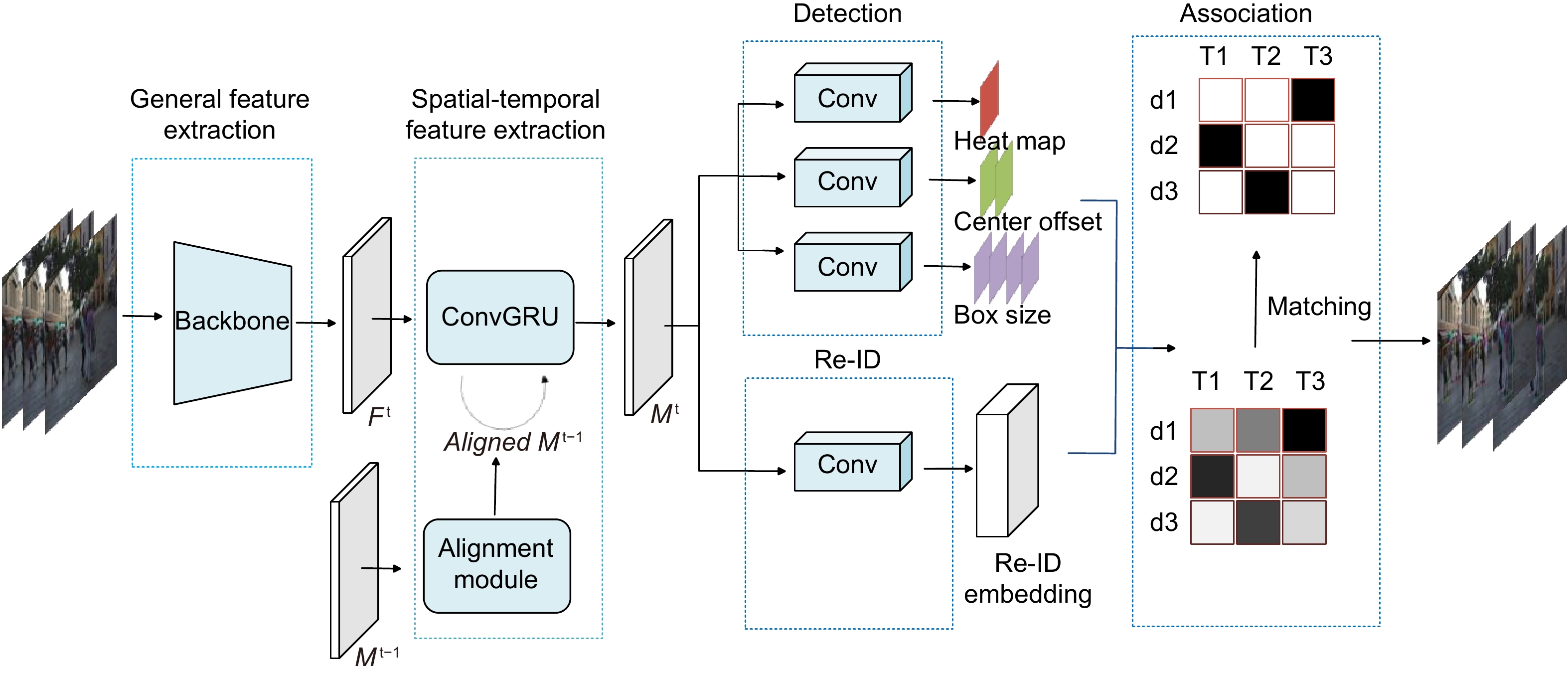
Figure 1.
Overall framework of the algorithm
-
Figure 2.
Gated recurrent unit
-
Figure 3.
Feature alignment
-
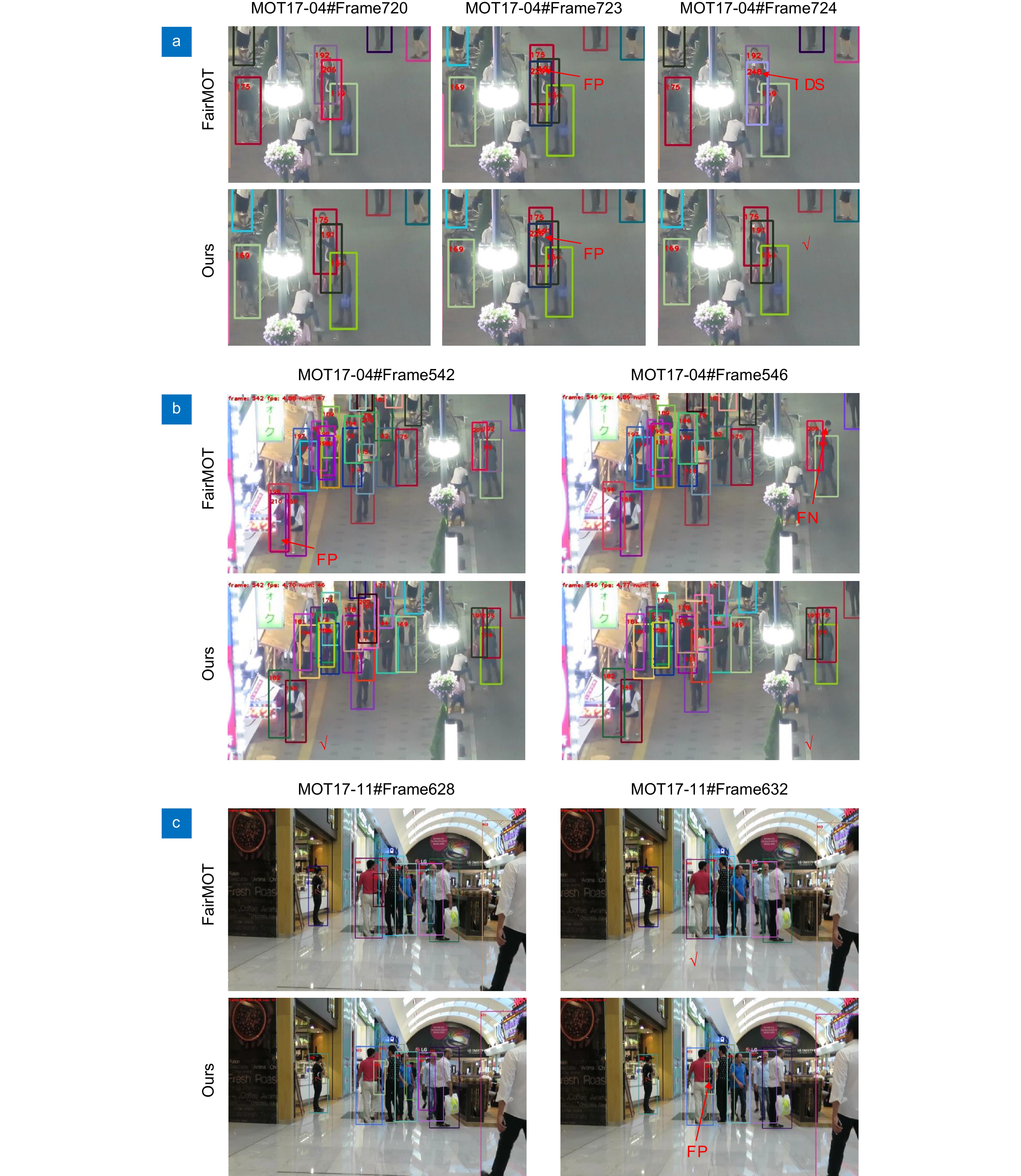
Figure 4.
The visualization results comparison between baseline and our method on validation set. (a) ID switch; (b) FP and FN; (c) special FP
-
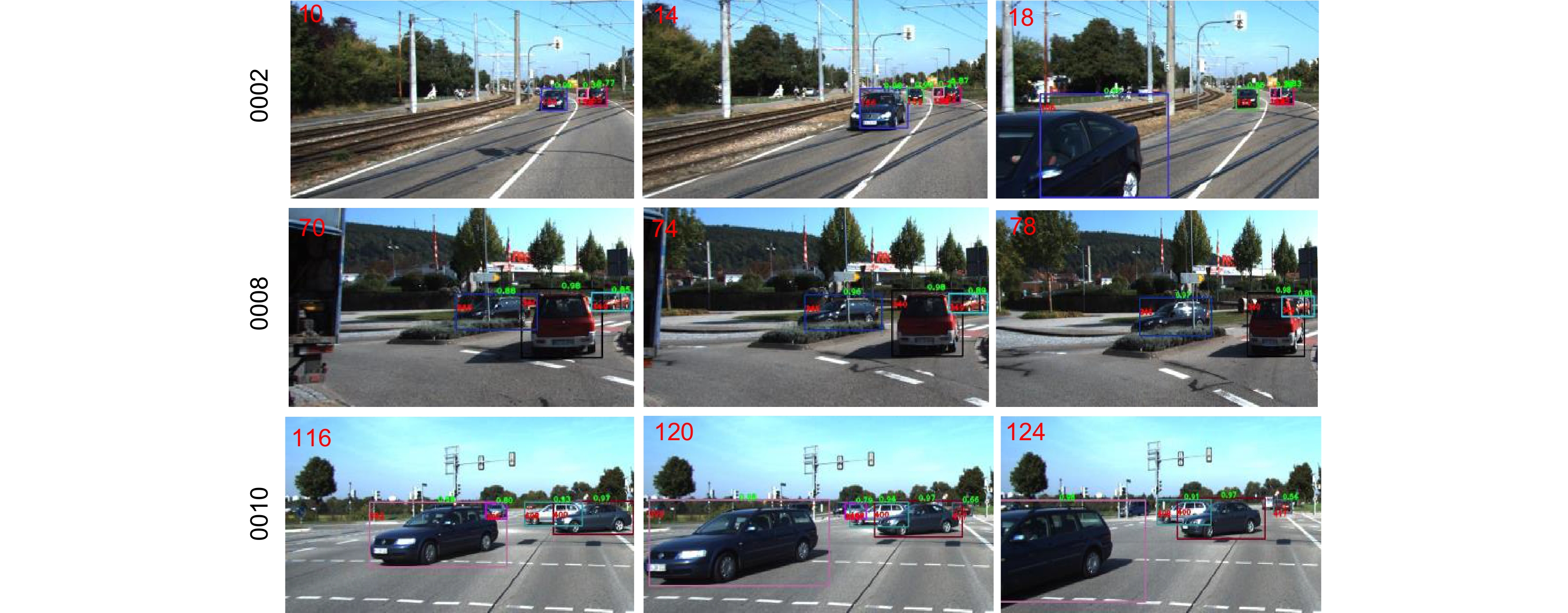
Figure 5.
Visualization results of this method on the KITTI test set. The video number is in the left side of the figure. The frame number is in the upper left of the figure
- Figure .


