
 E-mail Alert
E-mail Alert RSS
RSS
| Citation: |
Han Dongjuan, Tan Xiaomin, Shi Pingyan. A cycle elimination TLM-CFAR detector for Weibull clutter[J]. Opto-Electronic Engineering, 2018, 45(5): 170593. doi: 10.12086/oee.2018.170593

|
A cycle elimination TLM-CFAR detector for Weibull clutter
-
Abstract
For the problem of constant false alarm rate (CFAR) detection in Weibull clutter background, a CFAR detector—cycle elimination TLME-CFAR detector is proposed. The detector calculates its detection threshold through the estimation of two parameters of Weibull distribution, which is based on TL-moment estimation. The effect of the interference target and the strong scattering point are then eliminated by the cyclic elimination method. This paper proved that the proposed detector is a CFAR detector, and then the performance of the detector is studied by Monte Carlo simulation and compared with the MLH-CFAR detector. The result shows that the cyclic elimination TLM-CFAR detector has very nearly the same performance with MLH-CFAR detector. The detector avoids iterated operation of maximum likelihood estimation, and improves the efficiency and applicability of detection algorithm.-
Keywords:
- Weibull distribution /
- TL-moment estimation /
- CFAR /
- detection performance
-

-
References
[1] 何友, 关键, 孟祥伟, 等.雷达目标检测与恒虚警处理[M].北京:清华大学出版社, 2011. He Y, Guan J, Meng X W, et al. Radar target detection and CFAR processing[M]. Beijing: Tsinghua University Press, 2011. [2] Weber P, Haykin S. Ordered statistic CFAR processing for two-parameter distributions with variable skewness[J]. IEEE Transactions on Aerospace and Electronic Systems, 1985, AES–21(6): 819–821. doi: 10.1109/TAES.1985.310668 [3] Ravid R, Levanon N. Maximum-likelihood CFAR for Weibull background[J]. IEE Proceedings F-Radar and Signal Processing, 1992, 139(3): 256–264. doi: 10.1049/ip-f-2.1992.0033 [4] Levanon N, Shor M. Order statistics CFAR for Weibull background[J]. IEE Proceedings F-Radar and Signal Processing, 1990, 137(3): 157–162. doi: 10.1049/ip-f-2.1990.0023 [5] Teimouri M, Hoseini S M, Nadarajah S. Comparison of estimation methods for the Weibull distribution[J]. Statistics, 2013, 47(1): 93–109. doi: 10.1080/02331888.2011.559657 [6] Akram M, Hayat A. Comparison of estimators of the Weibull distribution[J]. Journal of Statistical Theory and Practice, 2014, 8(2): 238–259. doi: 10.1080/15598608.2014.847771 [7] Hosking J R M. L-moments: Analysis and estimation of distributions using linear combinations of order statistics[J]. Journal of the Royal Statistical Society. Series B, 1990, 52(1): 105–124. [8] Elamir E A H, Seheult A H. Trimmed L-moments[J]. Computational Statistics & Data Analysis, 2003, 43(3): 299–314. [9] 李军, 王雪松, 王涛.基于分数阶矩估计的非参量CFAR检测[J].电子与信息学报, 2011, 33(3): 642–645. Li J, Wang X S, Wang T. Nonparametric CFAR detection based on fractional moment estimations[J]. Journal of Electronics & Information Technology, 2011, 33(3): 642–645. -
Overview

Overview: Target detection in a changing clutter and keeping the probability of false alarm constant is one of the important issues which cannot be avoided by each system and designer. CFAR technology is the most important tool in the control of false alarm rate in automatic radar target detection system, which plays an important role in the process of automatic radar detection. CFAR processing refers to adjusting the detection threshold by estimating the average clutter power of reference cells near cell under test under the condition of a constant false alarm rate. The classic CFAR detectors include ML-CFAR detectors and OS-CFAR detectors, and others are combination of the two detectors. However ML-CFAR detectors and OS-CFAR detectors are single-parameter CFAR detectors, while the Weibull PDF is a two-parameter distribution. If both the shape parameter and the scale parameter are taken into account, the two-parameter estimation CFAR detection method should be used.
The shape parameter and scale parameter of Weibull distribution are estimated by using the reference samples in the reference sliding window. Werber and Haykin propose a method to set the detection threshold using two ordered statistical samples which is known as Werber-Haykin algorithm internationally, referred to as WH algorithm. Levanon and Ravid proposed the maximum likelihood CFAR algorithm (MLH-CFAR). Levanon has pointed out that CFAR loss is related to the accuracy of shape parameter estimation. MLH is an option when estimating the two parameters, but MLH estimator does not have a closed-form expression for estimation of shape and scale parameters and needs to be computed by the iterative process, thus reducing usability. In order to reduce the estimated variance of shape parameters and improve the efficiency of the algorithm, we estimate the two parameters of Weibull distribution by TL-moment estimation (TLME), and propose a cyclic elimination TLM-CFAR detection device.
For the problem of constant false alarm rate (CFAR) detection in Weibull clutter background, a CFAR detector—cycle elimination TLME-CFAR detector is proposed. The detector calculates its detection threshold through the estimation of two parameters of Weibull distribution, which is based on TL-moment estimation. The two parameters (shape and scale) of the background statistics are estimated using a TL-moment estimation algorithm. A CFAR threshold based on parameters estimated in this way exhibits a smaller variance, and hence a smaller CFAR loss, than thresholds based on other estimation algorithms such as moments. The effect of the interference target and the strong scattering point are then eliminated by the cyclic elimination method which analyzes detector performance in comparison with MLH-CFAR detector, and the cyclic elimination TLM-CFAR detector has very nearly the same performance with MLH-CFAR detector. The detector avoids iterated operation of maximum likelihood estimation, and improves the efficiency and applicability of detection algorithm.
-
Access History
Figures(10)
Tables(4)
Article Metrics

Export File
Citation
Han Dongjuan, Tan Xiaomin, Shi Pingyan. A cycle elimination TLM-CFAR detector for Weibull clutter[J]. Opto-Electronic Engineering, 2018, 45(5): 170593. doi: 10.12086/oee.2018.170593
Format
Content
 DownLoad:
DownLoad:
-
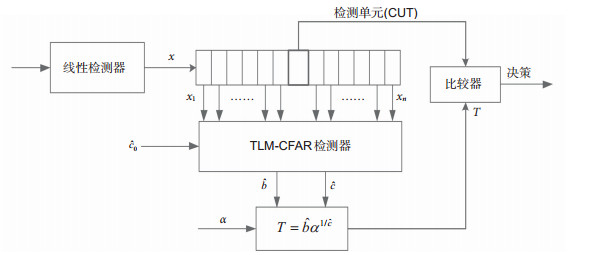
Figure 1.
Structure of TLM-CFAR detector
-
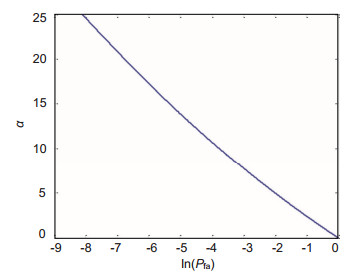
Figure 2.
The relationship between false alarm proba-bility and threshold coefficient (c=1.452, n=32)
-
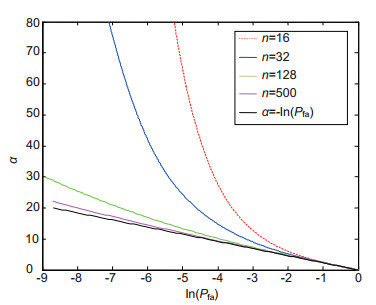
Figure 3.
The relationship between Pfa and α when shape parameter is unknown
-
Figure 4.
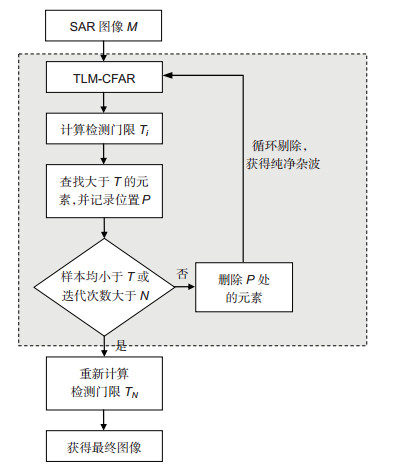
The flow chart of cycle elimination TLME-CFAR detector
-
Figure 5.
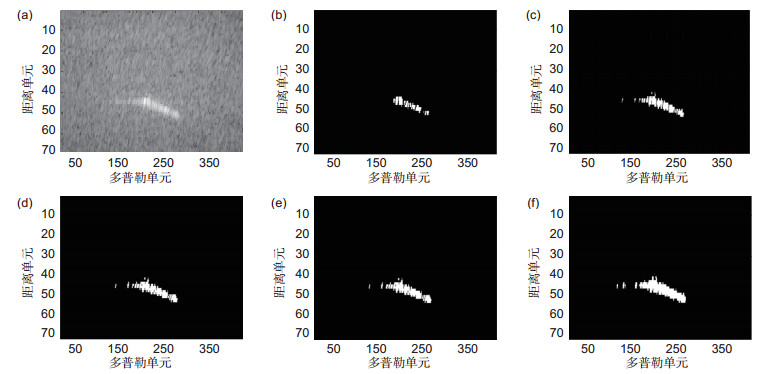
The detection results of cycle elimination process. (a) Original SAR image; (b) First elimination result; (c) Second elimination result; (d) Third elimination result; (e) Fourth elimination result; (f) Fifth elimination result
-
Figure 6.
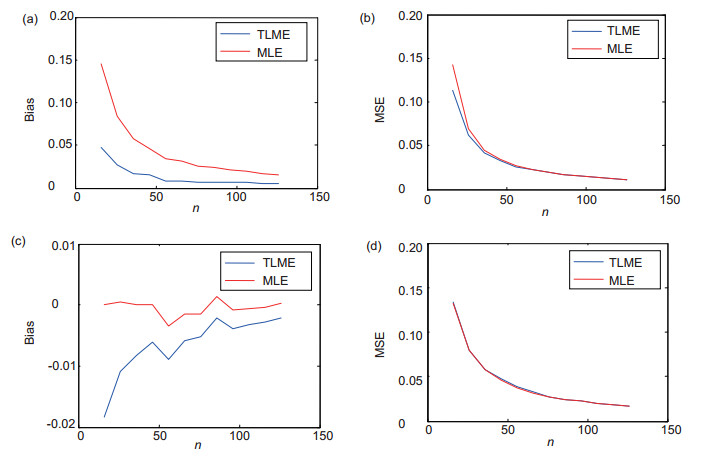
Performance comparison of two parameter estimation methods. (a), (b) Shape parameter; (c), (d) Scale parameter
-
Figure 7.
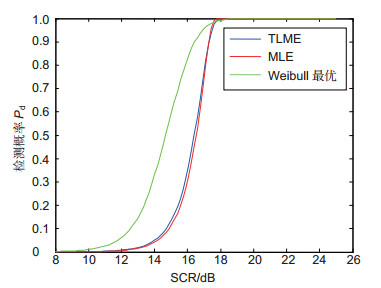
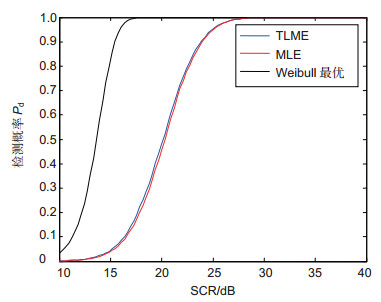
Detection performance curve when shape parameter is known
-
Figure 8.
Detection performance curve when shape parameter is unknown
-
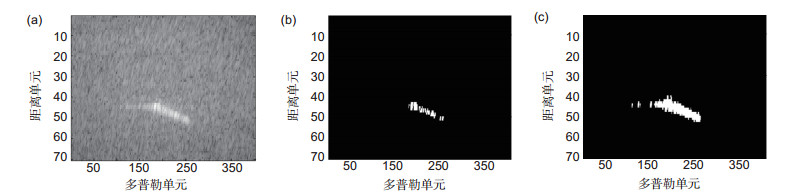
Figure 9.
Single target detection results. (a) Original SAR image; (b) The results of MLH-CFAR algorithm; (c) The results of cycle elimination TLM-CFAR
-
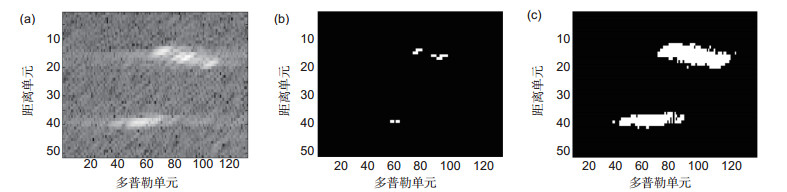
Figure 10.
Multi-targets detection results. (a) Original SAR image; (b) The results of MLH-CFAR algorithm; (c) The results of cycle elimination TLM-CFAR


