
 E-mail Alert
E-mail Alert RSS
RSS
| Citation: |
Chen Danqi, Jin Guodong, Tan Lining, et al. Target positioning of UAV airborne optoelectronic platform based on nonlinear least squares[J]. Opto-Electronic Engineering, 2019, 46(9): 190056. doi: 10.12086/oee.2019.190056

|
Target positioning of UAV airborne optoelectronic platform based on nonlinear least squares
-
Abstract
The target positioning algorithm of the traditional unmanned aerial vehicle (UAV) airborne optoelectronic platform introduces a large number of angle measurement errors, resulting in low target positioning accuracy. In this paper, a hybrid nonlinear algorithm of least squares and Gauss-Newton is proposed. Firstly, the Gauss-Newton iterative nonlinear target localization algorithm based on laser ranging value is derived. Then the rough solution of linear least square is used as the initial value of the nonlinear Newton iteration method for target location estimation. The algorithm combines the advantages of the simple and easy implementation of the least squares method and the high convergence accuracy of the Gauss-Newton method, and satisfies the requirements of the Gauss-Newton method for the initial value accuracy. Experimental results of measured data show that the longitude error of fixed target positioning results of this method is less than 1.37×10-5 degrees, the latitude error is less than 6.31×10-5 degrees, and the height error is less than 1.78 meters. And the processing time of each positioning is within 6 ms, which meets the requirements of real-time positioning.-
Keywords:
- UAV /
- target positioning /
- laser ranging /
- nonlinear least squares /
- Gauss-Newton method
-

-
References
[1] 郝英好, 严晓芳, 白蒙, 等.无人机发展概览[M].北京:国防工业出版社, 2017. Hao Y H, Yan X F, Bai M, et al. Overview of UAV Development[M]. Beijing: National Defence Industry Press, 2017. [2] 王日俊, 白越, 曾志强, 等.多旋翼无人飞行器机载光电平台的复合补偿控制方法[J].光电工程, 2017, 44(10): 983–989. doi: 10.3969/j.issn.1003-501X.2017.10.006 Wang R J, Bai Y, Zeng Z Q, et al. Composite compensation control method for airborne opto-electronic platform mounted on multi-rotor UAV[J]. Opto-Electronic Engineering, 2017, 44(10): 983–989. doi: 10.3969/j.issn.1003-501X.2017.10.006 [3] 柏青青, 许建新, 邵慧, 等.无人机动态目标高精度定位方法研究[J].航空计算技术, 2014, 44(1): 73–77, 82. doi: 10.3969/j.issn.1671-654X.2014.01.019 Bai Q Q, Xu J X, Shao H, et al. Research on high-precision dynamic target location method of UAV[J]. Aeronautical Computing Technique, 2014, 44(1): 73–77, 82. doi: 10.3969/j.issn.1671-654X.2014.01.019 [4] 金兆飞, 雷仲魁, 李倩.基于运动目标跟踪与定位的无人机测速技术[J].光电工程, 2015, 42(2): 59–65. doi: 10.3969/j.issn.1003-501X.2015.02.010 Jin Z F, Lei Z K, Li Q. UAV measuring object velocity based on moving target tracking and orientation[J]. Opto-Electronic Engineering, 2015, 42(2): 59–65. doi: 10.3969/j.issn.1003-501X.2015.02.010 [5] 孙辉.机载光电平台目标定位与误差分析[J].中国光学, 2013, 6(6): 912–918. Sun H. Target localization and error analysis of airborne electro-optical platform[J]. China Optics, 2013, 6(6): 912–918. [6] 徐诚, 黄大庆.无人机光电侦测平台目标定位误差分析[J].仪器仪表学报, 2013, 34(10): 2265–2270. Xu C, Huang D Q. Error analysis for target localization with unmanned aerial vehicle electro-optical detection platform[J]. Chinese Journal of Scientific Instrument, 2013, 34(10): 2265–2270. [7] Madison R, DeBitetto P, Olean A R, et al. Target geolocation from a small unmanned aircraft system[C]//Proceedings of 2008 IEEE Aerospace Conference, Big Sky, MT, USA, 2008: 1–19. [8] 雷雨, 冯新喜, 朱灿彬, 等.基于测距最小二乘的方位融合多传感器定位算法[J].电光与控制, 2012, 19(1): 12–17. doi: 10.3969/j.issn.1671-637X.2012.01.004 Lei Y, Feng X X, Zhu C B, et al. An azimuth fusion locating algorithm based on RangeOnly least squares for multi-senor network[J]. Electronics Optics & Control, 2012, 19(1): 12–17. doi: 10.3969/j.issn.1671-637X.2012.01.004 [9] Mao X C, Wada M, Hashimoto H. Nonlinear iterative algorithm for GPS positioning with bias model[C]//Proceedings of the 7th International IEEE Conference on Intelligent Transportation Systems, Washington, WA, USA, 2004. https://www.researchgate.net/publication/4128635_Nonlinear_iterative_algorithm_for_GPS_positioning_with_bias_model?ev=auth_pub [10] 刘爱东, 杜亚杰, 孙海文.激光测距机距离交汇定位解法研究[J].现代电子技术, 2015, 38(19): 24–27, 32. doi: 10.3969/j.issn.1004-373X.2015.19.006 Liu A D, Du Y J, Sun H W. Research on positioning solutions of distance intersection applied with laser range-finder[J]. Modern Electronics Technique, 2015, 38(19): 24–27, 32. doi: 10.3969/j.issn.1004-373X.2015.19.006 [11] 吕晶晶, 姚金杰.基于最小二乘和牛顿迭代法的空中目标定位[J].微电子学与计算机, 2011, 28(9): 108–110. Lv J J, Yao J J. Aerial target localization based on least squares and newton iterative algorithm[J]. Microelectronics & Computer, 2011, 28(9): 108–110. [12] Taff L G. Target localization from bearings-only observations[J]. IEEE Transactions on Aerospace and Electronic Systems, 1997, 33(1): 2–10. doi: 10.1109/7.570703 [13] Siregar R W, Tulus, Ramli M. Analysis local convergence of gauss-newton method[J]. IOP Conference Series: Materials Science and Engineering, 2018, 300(1): 012044. [14] 吕帅华, 苏秀琴, 张占鹏, 等.一种基于高斯-牛顿法的光电经纬仪交会测量算法[J].光电工程, 2006, 33(11): 22–25. doi: 10.3969/j.issn.1003-501X.2006.11.005 Lv S H, Su X Q, Zhang Z P, et al. Algorithm of opto-electronic theodolite intersection based on Gauss-Newton method[J]. Opto-Electronic Engineering, 2006, 33(11): 22–25. doi: 10.3969/j.issn.1003-501X.2006.11.005 [15] 邱玲, 沈振康.三维纯角度被动跟踪定位的最小二乘-卡尔曼滤波算法[J].红外与激光工程, 2001, 30(2): 83–86. doi: 10.3969/j.issn.1007-2276.2001.02.002 Qiu L, Shen Z K. LS-Kalman algorithm for passive target location and tracking with bearing-only measurements[J]. Infrared and Laser Engineering, 2001, 30(2): 83–86. doi: 10.3969/j.issn.1007-2276.2001.02.002 -
Overview

Overview: In the past few decades, unmanned aerial vehicles (UAV) have developed rapidly, and they have been widely used in actual intelligence reconnaissance and target surveillance with their unique advantages such as zero casualties, long-term endurance, and high flexibility. Accurate positioning and tracking of battlefield targets is one of the most important military applications for UAV. At present, the traditional UAV airborne photoelectric platform target positioning algorithm is based on the single UAV photoelectric platform for angle information measurement and distance information measurement. However, the UAV attitude angle error and the photoelectric platform attitude angle error are introduced into the algorithm, which leads to the low target positioning accuracy. The target positioning method based on laser ranging value avoids the attitude angle of the UAV and the attitude angle error of the photoelectric platform in the calculation process, and has the advantages of less error source and high positioning accuracy, which is a common method for high-precision target positioning algorithm. The algorithm commonly used in target location estimation based on laser ranging values is a pseudo-linearized linear least squares method, but the pseudo-linearization process in the algorithm results in a large loss of observation accuracy, especially the target height localization precision. In this paper, a hybrid nonlinear algorithm of least squares and Gauss-Newton is proposed. The Gauss-Newton iteration method is a nonlinear algorithm with fast convergence speed and high precision, but it has certain requirements for the initial value of iteration. Therefore, this paper firstly deduces the pseudo-linearized least squares target localization algorithm, and based on this algorithm, roughly estimates the target position and obtains the coarse positioning result. Secondly, the Gauss-Newton iterative nonlinear target localization algorithm based on laser ranging value is derived. Then the linear least squares rough result is used as the initial value of the nonlinear Newton iteration method for target location estimation. The algorithm combines the advantages of the simple and easy implementation of the least squares method and the high convergence accuracy of the Gauss-Newton method, and satisfies the certain requirements of the Gauss-Newton method for the initial value accuracy. Experimental results of measured data show that the longitude error of fixed target positioning results of this method is less than 1.37×10-5 degrees, the latitude error is less than 6.31×10-5 degrees, and the height error is less than 1.78 meters. And the processing time of each positioning is within 8 ms, which meets the requirements of real-time positioning. The experimental results show that this algorithm has high engineering application value.
-
Access History
Figures(14)
Tables(1)
Article Metrics

Export File
Citation
Chen Danqi, Jin Guodong, Tan Lining, et al. Target positioning of UAV airborne optoelectronic platform based on nonlinear least squares[J]. Opto-Electronic Engineering, 2019, 46(9): 190056. doi: 10.12086/oee.2019.190056
Format
Content
 DownLoad:
DownLoad:


-
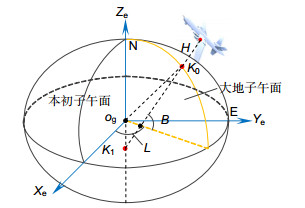
Figure 1.
Earth rectangular coordinate system ECEF
-
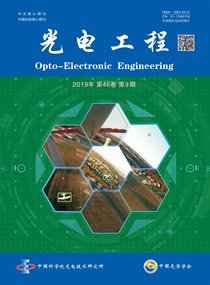
Figure 2.
Ranging positioning model
-
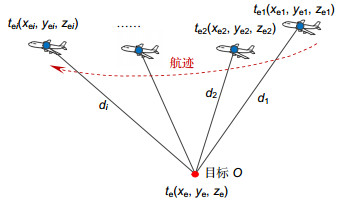
Figure 3.
Schematic diagram of simulated flight track
-
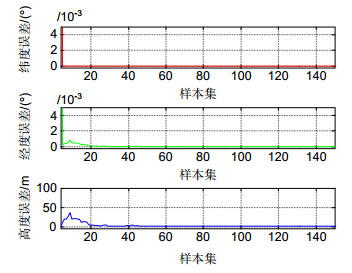
Figure 4.
The positioning error of the simulation target
-
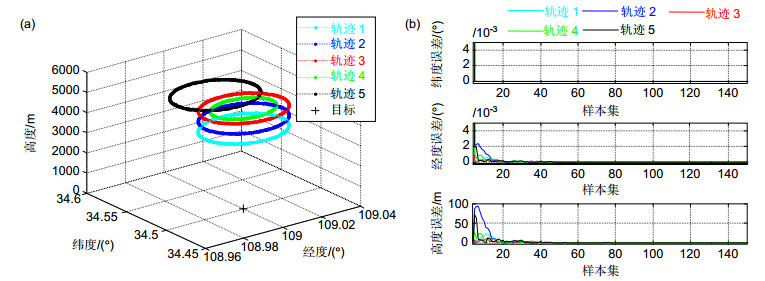
Figure 5.
Target positioning results under different simulation trajectories. (a) Different simulated flight paths; (b) Target positioning error
-
Figure 6.
Target positioning results under different error conditions. (a) Different UAV position errors; (b) Different laser ranging errors
-
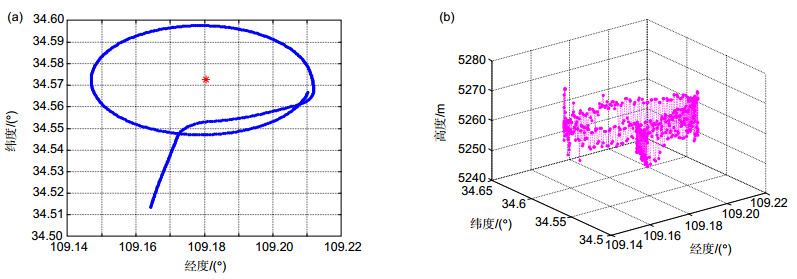
Figure 7.
Schematic diagram of flight trajectory measured. (a) Schematic diagram of flight path; (b) Flight path height transformation diagram
-
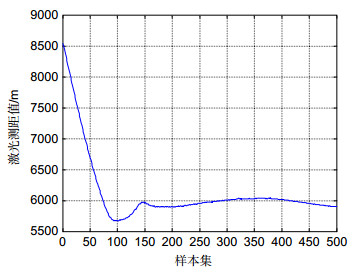
Figure 8.
Laser ranging value
-
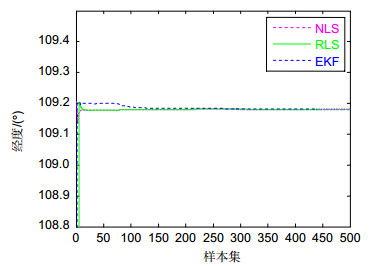
Figure 9.
Target positioning results - longitude
-
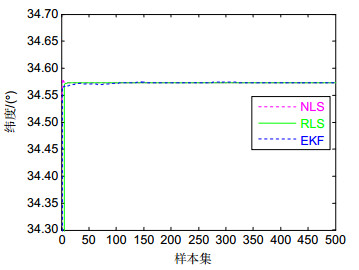
Figure 10.
Target positioning results - latitude
-
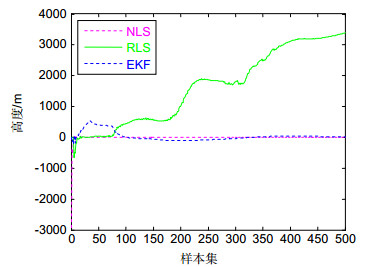
Figure 11.
Target positioning results - height
-
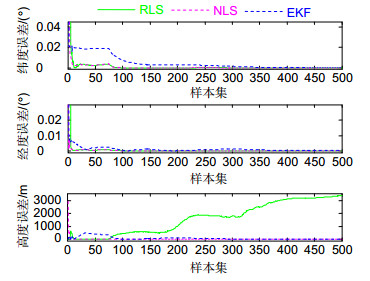
Figure 12.
Target positioning error
-
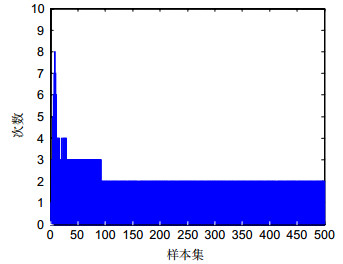
Figure 13.
Hybrid algorithm iterations for each positioning
-
Figure 14.
Hybrid algorithm time-consuming for each positioning


