
 E-mail Alert
E-mail Alert RSS
RSS
| Citation: |
Wang Y, Bian Q H, Liao J, et al. Strapdown inertial stabilization technology based on SBG inertial navigation in inertial stabilization gimbal[J]. Opto-Electron Eng, 2023, 50(5): 220238. doi: 10.12086/oee.2023.220238

|
Strapdown inertial stabilization technology based on SBG inertial navigation in inertial stabilization gimbal
-
Abstract
The lightweight SBG inertial navigation system has the characteristics of being small and light, which can be used for the direct and strapdown stabilization of the electro-optical tracking system. In this paper, five inertial stabilization control methods based on the lightweight SBG navigation system in gimbals are studied, and theoretical analysis and experimental validation are performed. The classical position strapdown stabilization technique has limited disturbance suppression capability due to the limitation of position bandwidth, which makes it difficult to meet the requirement of high-precision stabilization. A SBG-based position-rate dual strapdown feedforward stabilization method is proposed, and the decoupling of the strapdown feedforward is achieved by introducing a high-pass filter, which can further improve the perturbation rejection bandwidth as well as the stabilization capability of the system. Theoretical analysis and experimental results show that the SBG-based gyro direct stabilization control method is better at disturbance suppression when the application conditions are not considered, although it is limited by the bandwidth. Under the limitations of platform volume and weight, the proposed SBG-based dual disturbance strapdown stabilization can further improve the system's disturbance rejection capability and obtain better stabilization accuracy. -

-
References
[1] Yu Z Y, Yang T, Ruan Y, et al. A rate-difference disturbance observer control for a timing-belt servo system[J]. IEEE Trans Ind Electron, 2022, 69(1): 11458−11467. doi: 10.1109/tie.2021.3123642 [2] Hurák Z, Rezac M. Image-based pointing and tracking for inertially stabilized airborne camera platform[J]. IEEE Trans Control Syst Technol, 2012, 20(5): 1146−1159. doi: 10.1109/TCST.2011.2164541 [3] Ruan Y, Xu T R, Liu Y, et al. Error-based observation control of an image-based control loop for disturbance suppression in segmented lightweight large-scaled diffractive telescope (SLLDT)[J]. Opt Lasers Eng, 2022, 156: 107105. doi: 10.1016/j.optlaseng.2022.107105 [4] 唐涛, 马佳光, 陈洪斌, 等. 光电跟踪系统中精密控制技术研究进展[J]. 光电工程, 2020, 47(10): 200315. doi: 10.12086/oee.2020.200315 Tang T, Ma J G, Chen H B, et al. A review on precision control methodologies for optical-electric tracking control system[J]. Opto-Electron Eng, 2020, 47(10): 200315. doi: 10.12086/oee.2020.200315 [5] 李志俊, 毛耀, 亓波, 等. 量子光通信中位置修正单检测控制方法[J]. 光电工程, 2022, 49(3): 210311. doi: 10.12086/oee.2022.210311 Li Z J, Mao Y, Qi B, et al. Research on control technology of single detection based on position correction in quantum optical communication[J]. Opto-Electron Eng, 2022, 49(3): 210311. doi: 10.12086/oee.2022.210311 [6] Hilkert J M. Inertially stabilized platform technology concepts and principles[J]. IEEE Control Syst Mag, 2008, 28(1): 26−46. doi: 10.1109/MCS.2007.910256 [7] 张良总, 杨涛, 吴云, 等. 基于图像测量的Stewart平台双阶控制技术[J]. 光电工程, 2022, 49(8): 220019. doi: 10.12086/oee.2022.220019 Zhang L Z, Yang T, Wu Y, et al. Image measurement-based two-stage control of Stewart platform[J]. Opto-Electron Eng, 2022, 49(8): 220019. doi: 10.12086/oee.2022.220019 [8] 田竞. 惯性稳定平台中的多传感器控制技术研究[D]. 成都: 电子科技大学, 2016. Tian J. Research on multiple sensors control technology of inertial stabled-platforms[D]. Chengdu: University of Electronic Science and Technology of China, 2016. [9] Glück M, Pott J U, Sawodny O. Investigations of an accelerometer-based disturbance feedforward control for vibration suppression in adaptive optics of large telescopes[J]. Publ Astron Soc Pac, 2017, 129(976): 065001. doi: 10.1088/1538-3873/aa632b [10] El-Sheimy N, Youssef A. Inertial sensors technologies for navigation applications: state of the art and future trends[J]. Satell Navig, 2020, 1(1): 2. doi: 10.1186/s43020-019-0001-5 [11] 夏文强, 何秋农, 段倩文, 等. 基于传感器优化与鲁棒预测的等效加速度前馈[J]. 光电工程, 2021, 48(11): 210153. doi: 10.12086/oee.2021.210153 Xia W Q, He Q N, Duan Q W, et al. Equivalent acceleration feedforward based on sensor optimization and robust prediction[J]. Opto-Electron Eng, 2021, 48(11): 210153. doi: 10.12086/oee.2021.210153 [12] Řezáč M, Hurák Z. Vibration rejection for inertially stabilized double gimbal platform using acceleration feedforward[C]//2011 IEEE International Conference on Control Applications, 2011: 363–368. https://doi.org/10.1109/CCA.2011.6044442. [13] Li M, Li J, Zhang R Q. Unbalance disturbance restraining for inertial stabilized platform[C]//2016 Chinese Control and Decision Conference, 2016: 2723–2728. https://doi.org/10.1109/CCDC.2016.7531444. [14] Xia Y Z, Bao Q L, Liu Z D. A new disturbance feedforward control method for electro-optical tracking system line-of-sight stabilization on moving platform[J]. Sensors, 2018, 18(12): 4350. doi: 10.3390/s18124350 [15] Kennedy P J, Kennedy R L. Direct versus indirect line of sight (LOS) stabilization[J]. IEEE Trans Control Syst Technol, 2003, 11(1): 3−15. doi: 10.1109/TCST.2002.806443 [16] Sisu S, Şuvak Ö. Comparison of direct and indirect stabilization methods for gyro stabilized gimbal systems[C]//2020 12th International Conference on Electrical and Electronics Engineering, 2020: 251–255. [17] Chen Y, Xue Y Y, Zhang X J, et al. Target tracking system based on inertial stabilized platform[J]. Appl Mech Mater, 2012, 271–272: 1669−1674. doi: 10.4028/www.scientific.net/AMM.271-272.1669 [18] Zubov A V. Stabilization of program motion and kinematic trajectories in dynamic systems in case of systems of direct and indirect control[J]. Autom Remote Control, 2007, 68(3): 386−398. doi: 10.1134/S0005117907030022 -
Overview
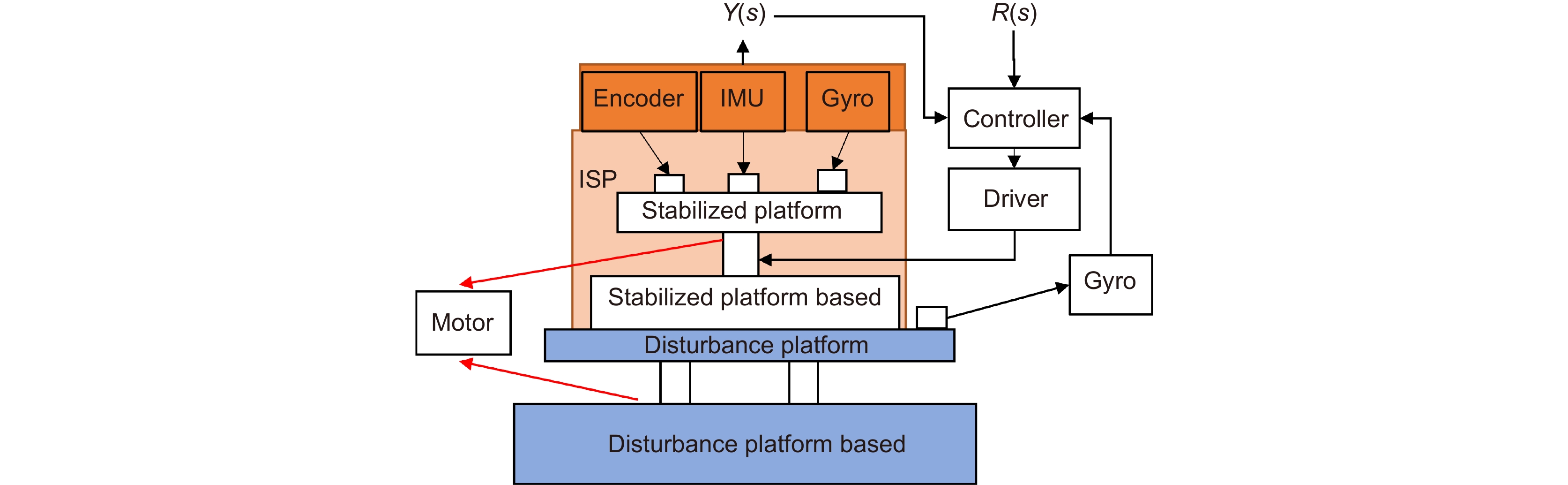
Inertial sensors are often used to maintain inertial stabilization and compensate disturbance in moving platform gimbal systems, which are widely used in engineering applications such as vehicles, satellites, ground-based equipment, and other moving platforms. Maintaining the line of sight (LOS) toward a target is challenging when the gimbal systems work in an environment with severe disturbance or when the target is highly dynamic. According to the installation methods of the sensors, the control methods can be divided into two types: direct stabilization and strapdown inertial stabilization. In direct stabilization method, the inertial sensors are directly mounted on the LOS axes to compensate the disturbance, which is simple to achieve but the disturbance suppression capability is limited by the closed-loop bandwidth of the system. However, the closed-loop bandwidth of the system is limited by the resonant frequency of the platform, which is difficult to improve, resulting in limited system disturbance surpression capability. The lightweight SBG inertial navigation system, produced by SBG Systems company, has the characteristics of being small and lightweight, which can be used for the direct and strapdown stabilization of the electro-optical tracking system. In this paper, five inertial stabilization control methods based on lightweight SBG navigation system in gimbals are studied, and theoretical analysis and experimental validation are performed. The classical position strapdown stabilization technique has limited disturbance suppression capability due to the limitation of position bandwidth, which makes it difficult to meet the requirement of high-precision stabilization. A SBG-based position-rate dual strapdown feedforward stabilization method is proposed, and the decoupling of the strapdown feedforward is achieved by introducing a high-pass filter, which can further improve the perturbation rejection bandwidth as well as the stabilization capability of the system. Theoretical analysis and experimental results show that the SBG-based gyro direct stabilization control method is better at disturbance suppression when the application conditions are not considered, although it is limited by the bandwidth. Under the limitations of platform volume and weight, the proposed SBG-based dual disturbance strapdown stabilization can further improve the system's disturbance rejection capability and obtain better stabilization accuracy.
-
Access History
Figures(13)
Tables(3)
Article Metrics

Export File
Citation
Wang Y, Bian Q H, Liao J, et al. Strapdown inertial stabilization technology based on SBG inertial navigation in inertial stabilization gimbal[J]. Opto-Electron Eng, 2023, 50(5): 220238. doi: 10.12086/oee.2023.220238
Format
Content
 DownLoad:
DownLoad:
-
Figure 1.
Inertial stablization gimbal schematic
-
Figure 2.
Direct position stabilization block diagram based on SBG
-
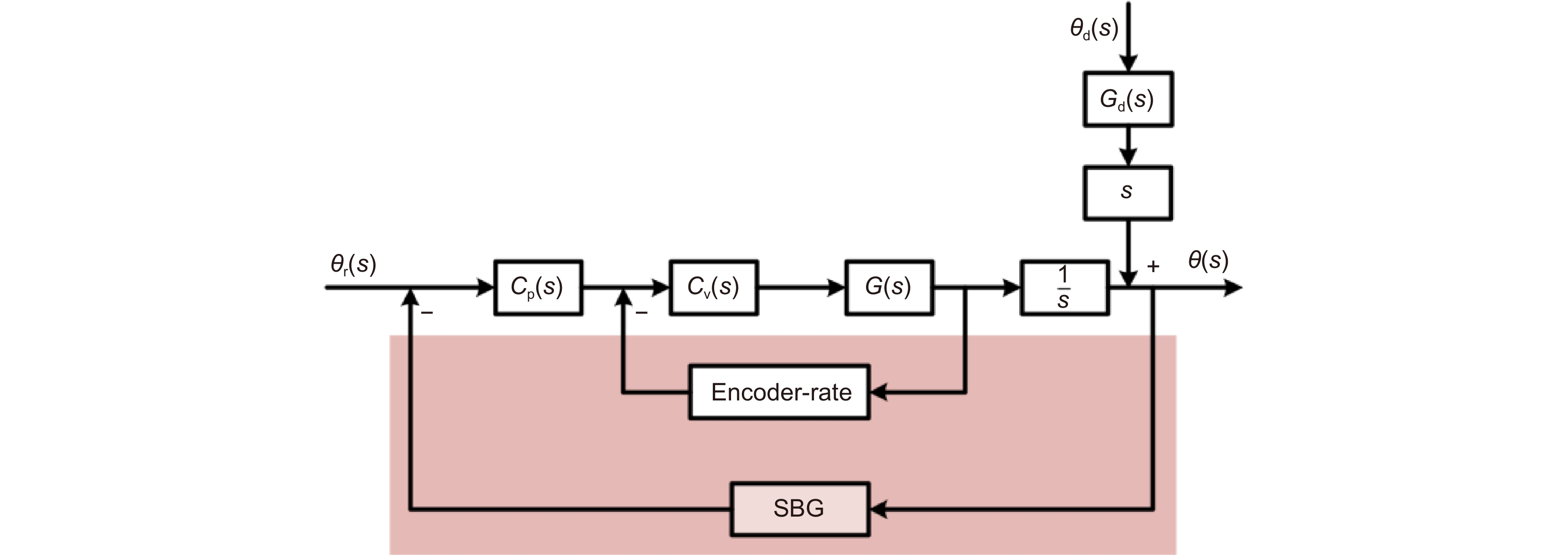
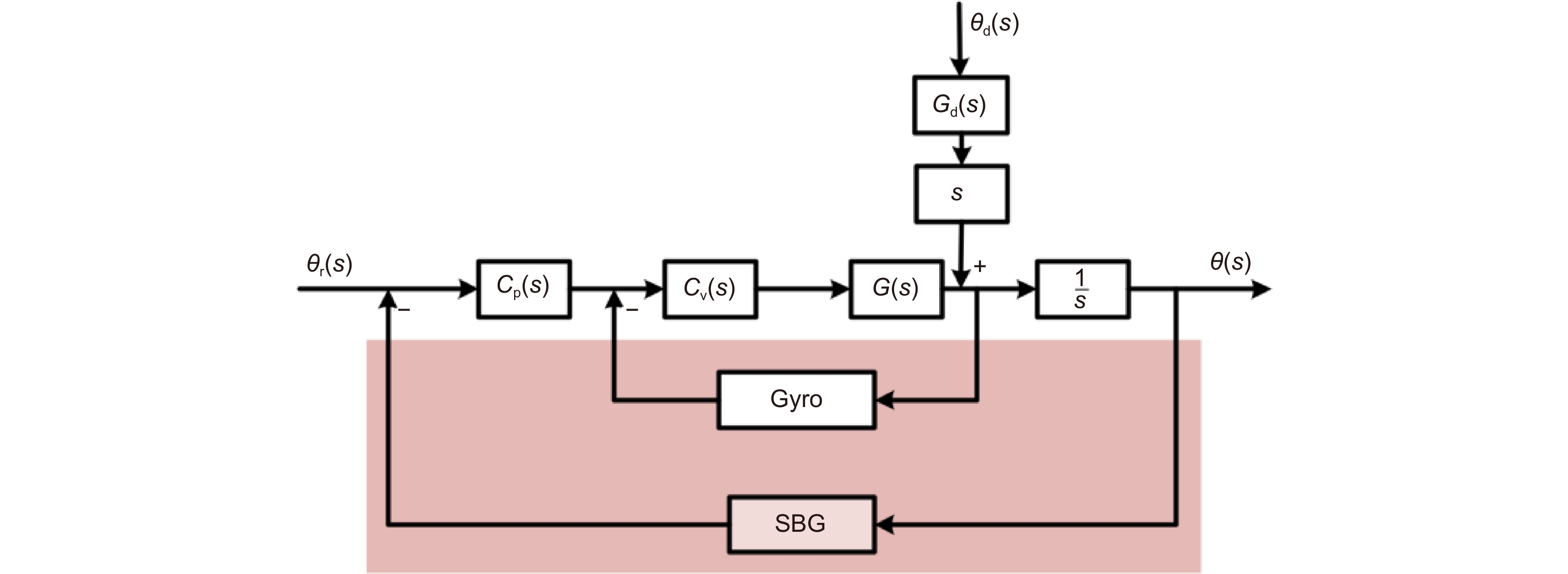
Figure 3.
The rate feedback based on SBG feedback
-
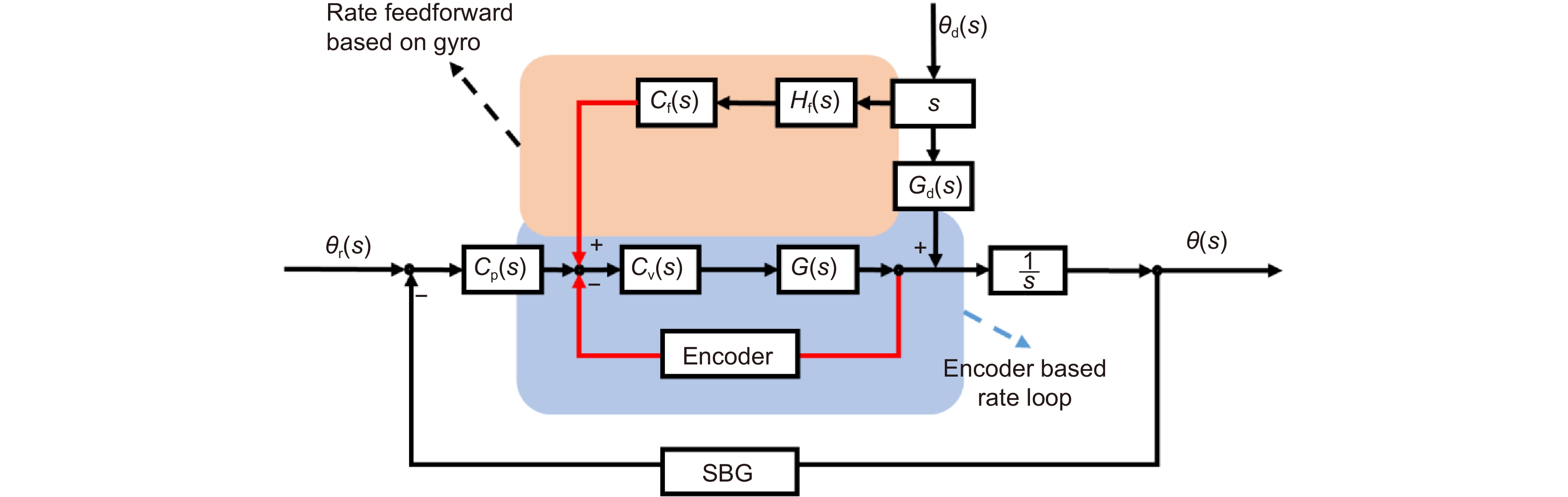
Figure 4.
Angular rate feedforward block diagram based on gyro
-
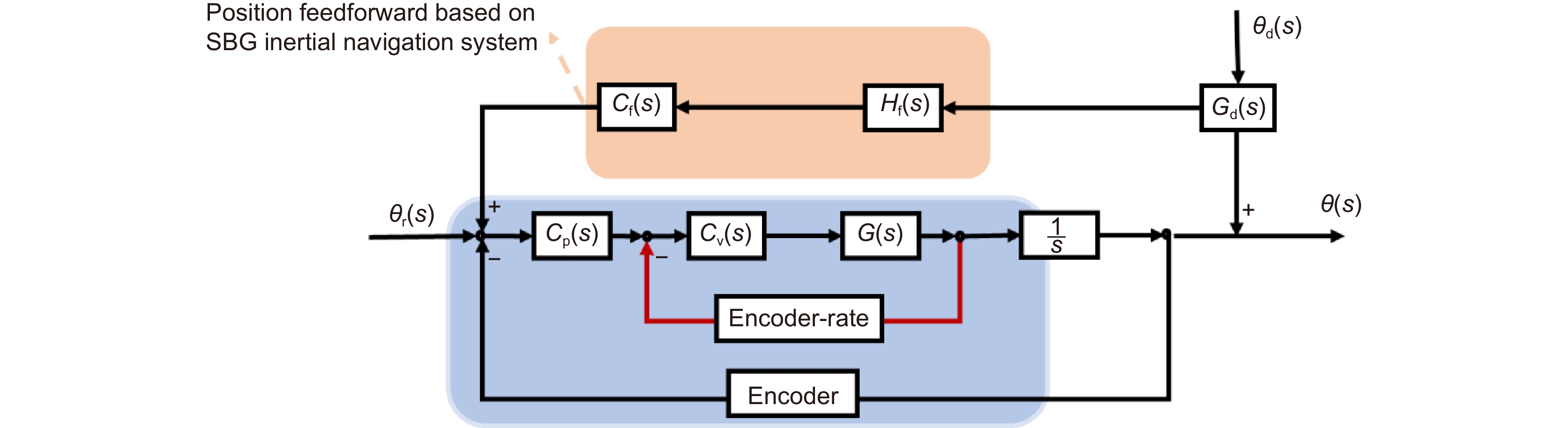
Figure 5.
Strapdown stabilization block diagram based on SBG position
-
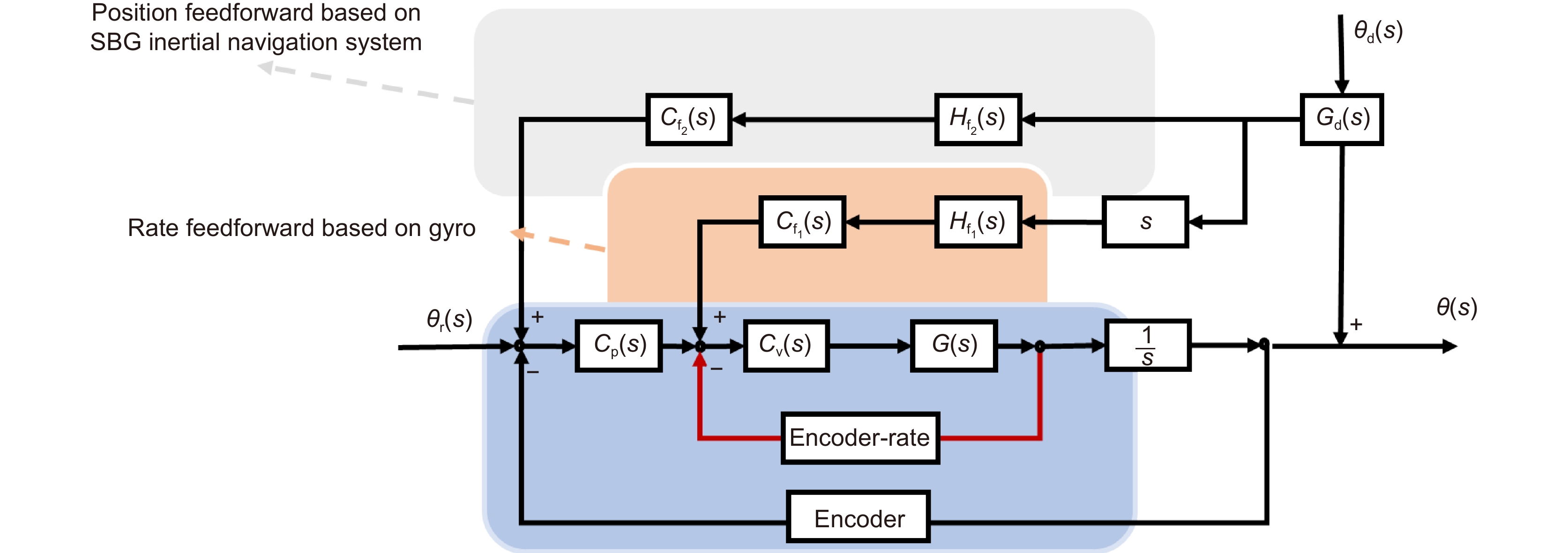
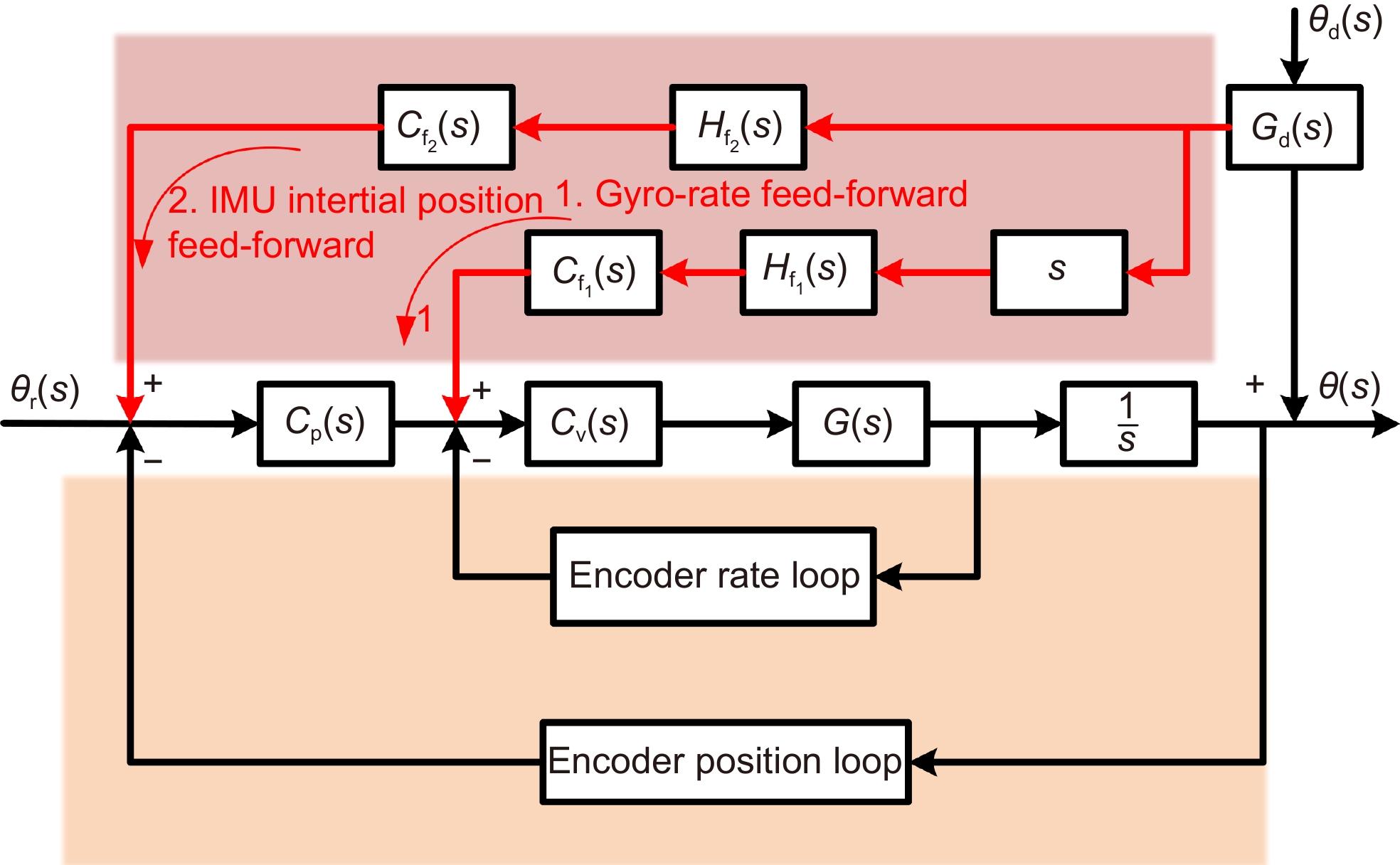
Figure 6.
Dual disturbancetrapdown control block diagram based on SBG
-
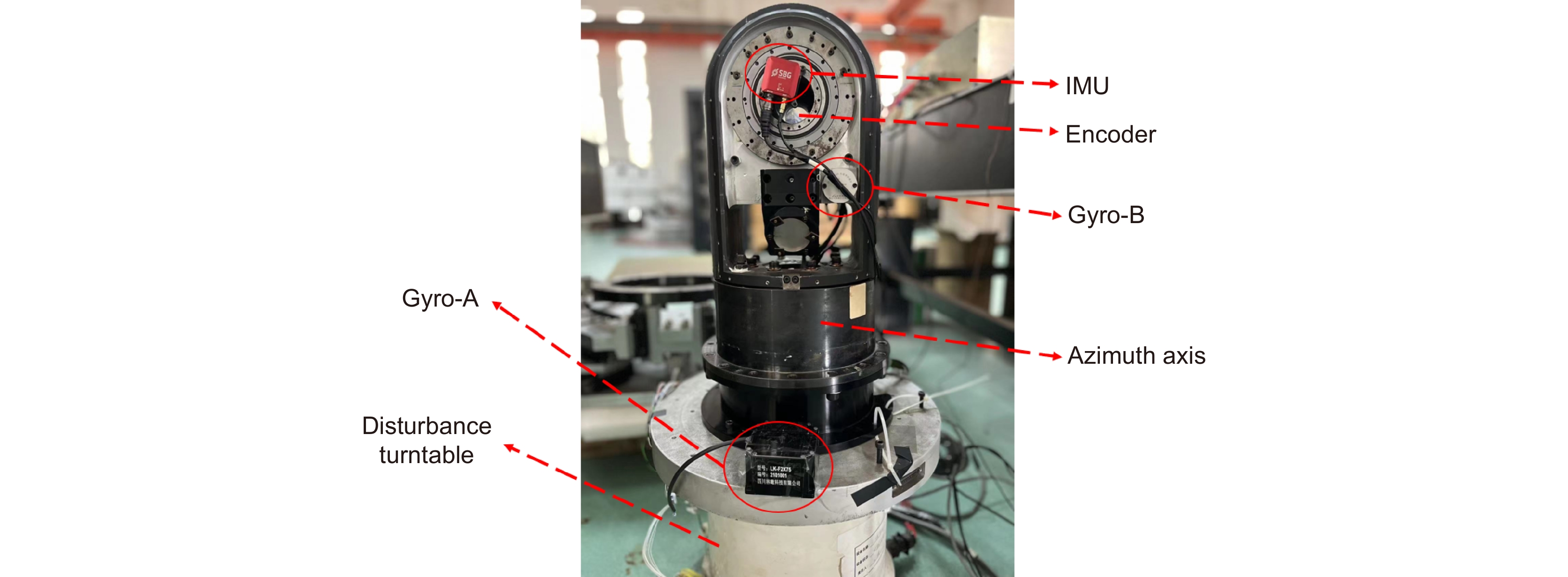
Figure 7.
Inertial stabilization gimbal experimental platform diagram
-
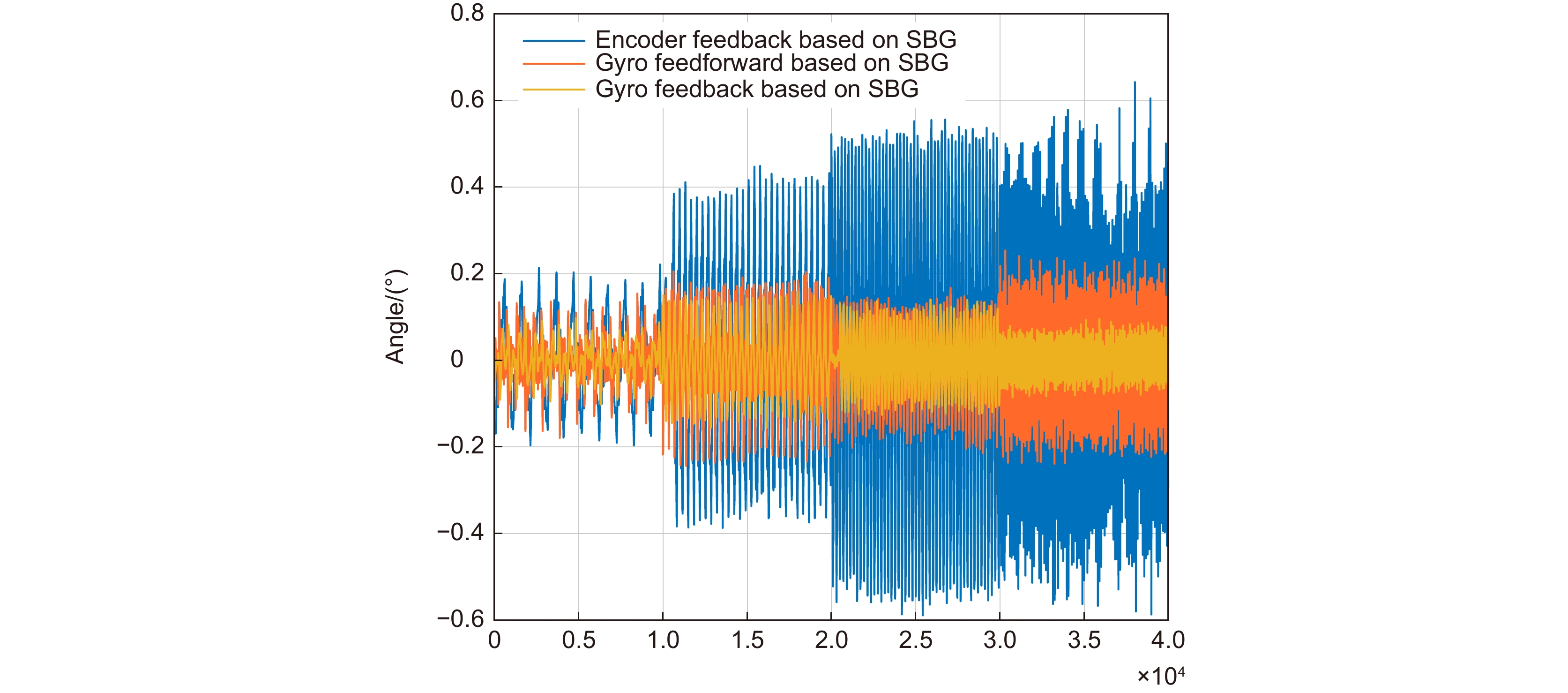
Figure 8.
Stabilization errors under different disturbance frequencies
-
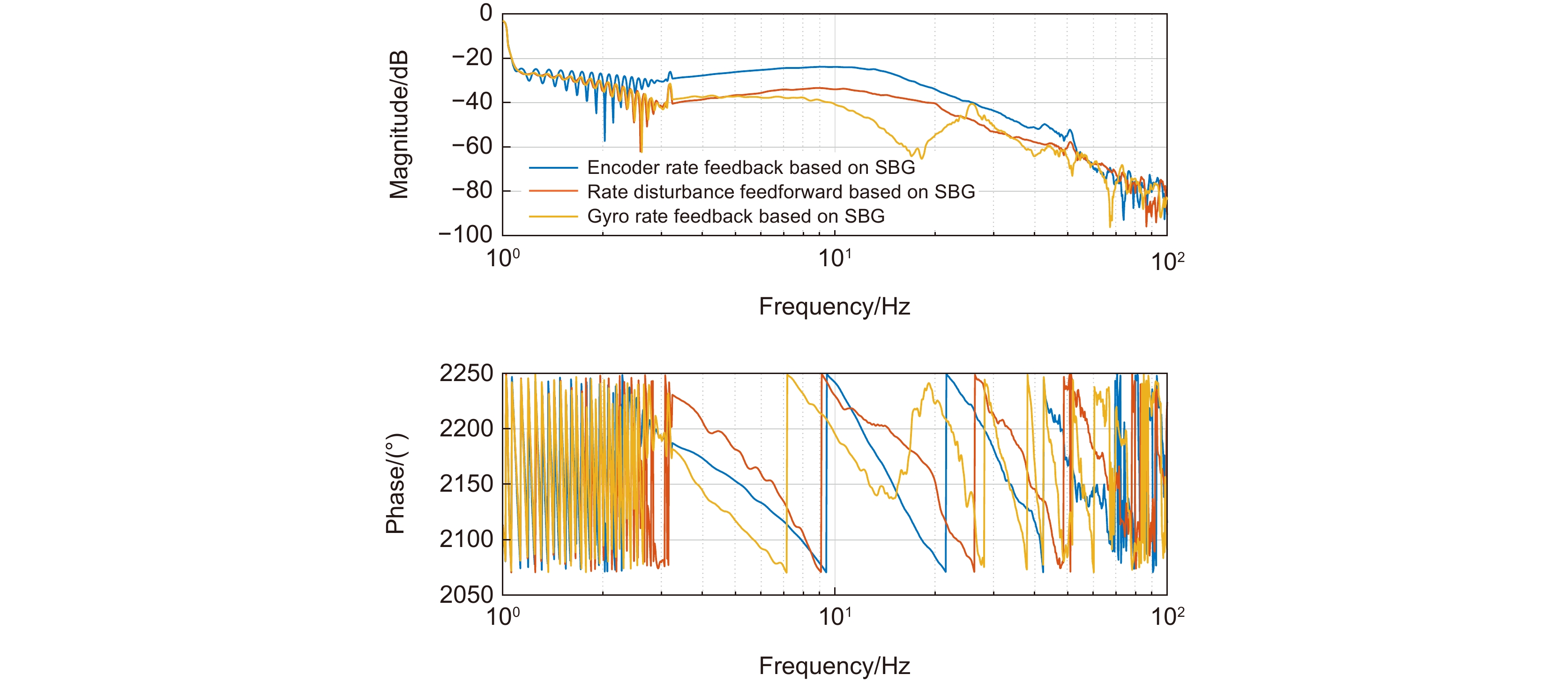
Figure 9.
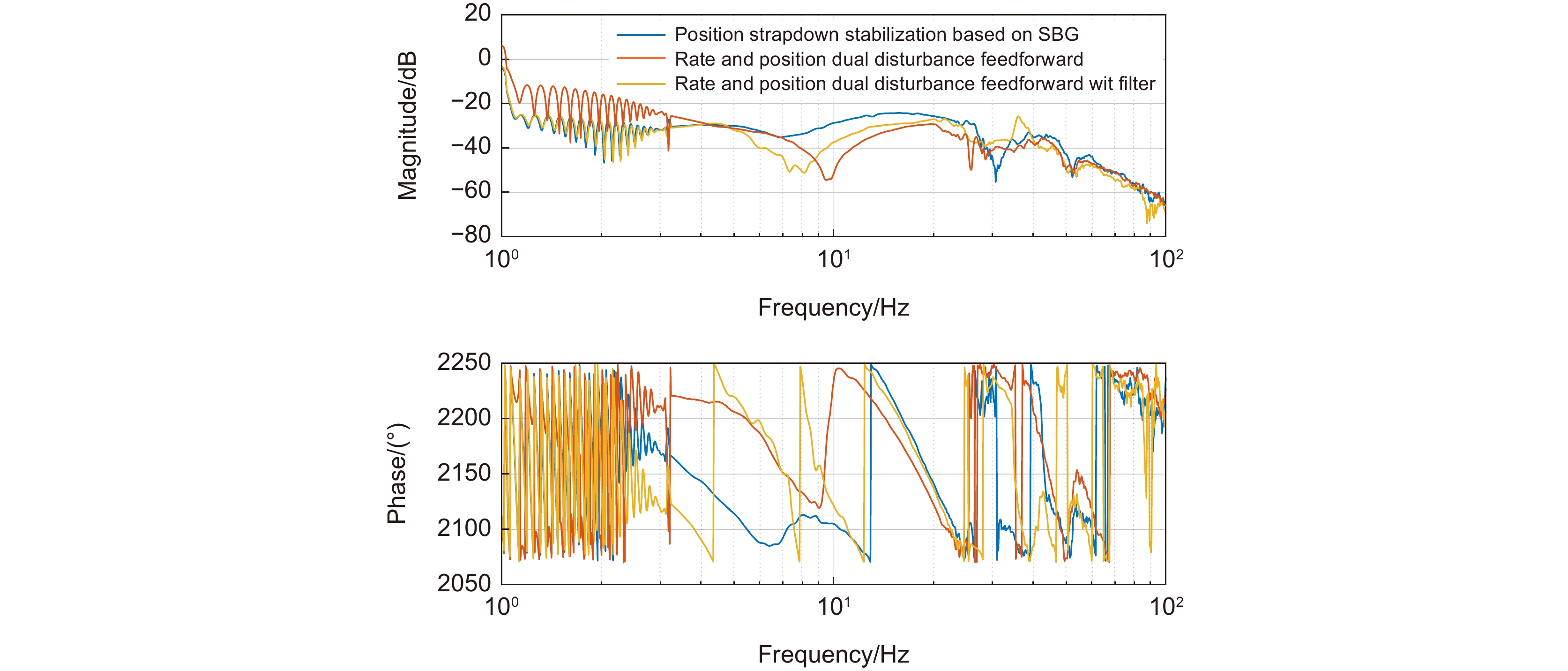
Disturbance suppression frequency response curves
-
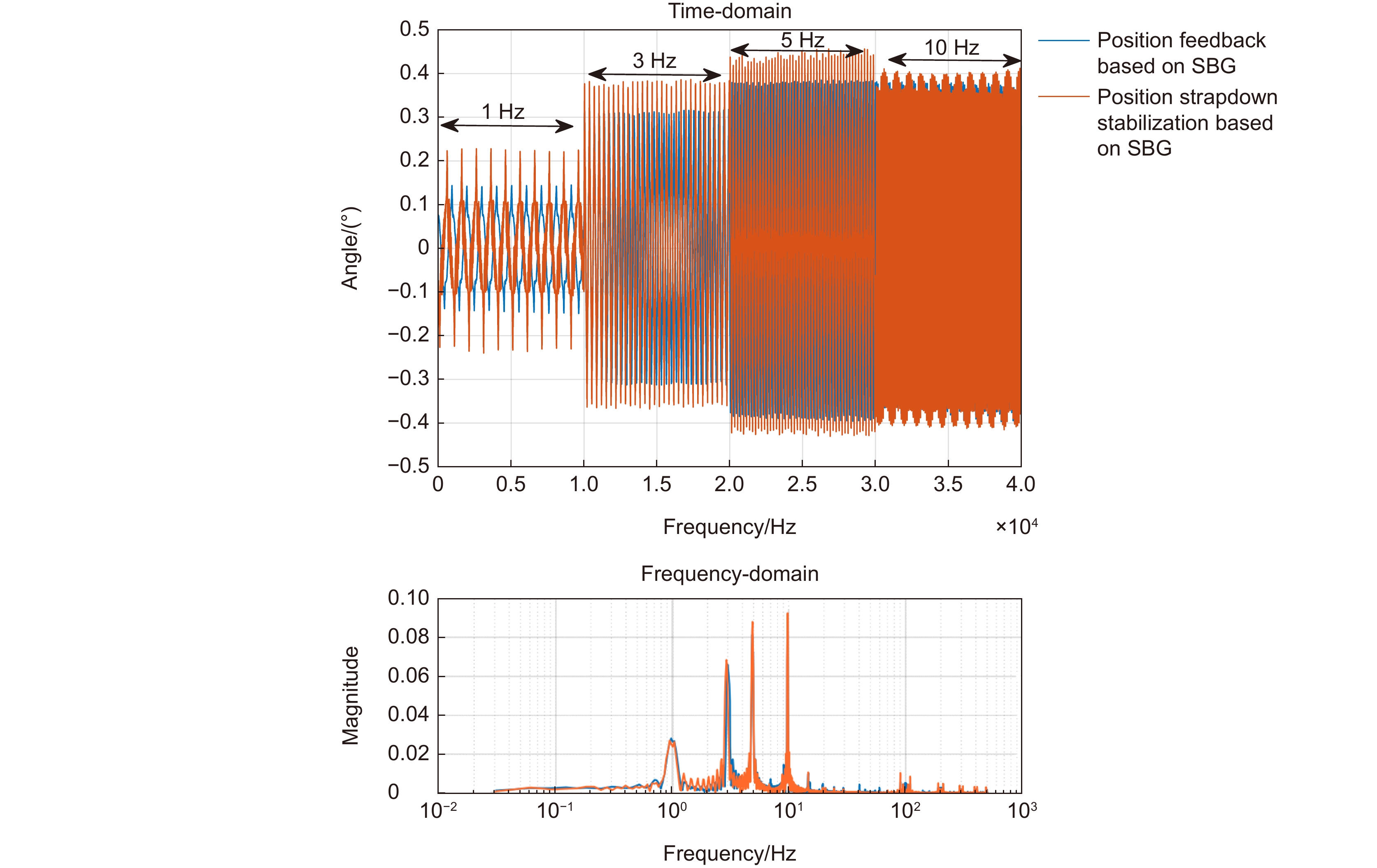
Figure 10.
Stabilization errors and Fourier transform under under different frequency disturbance
-
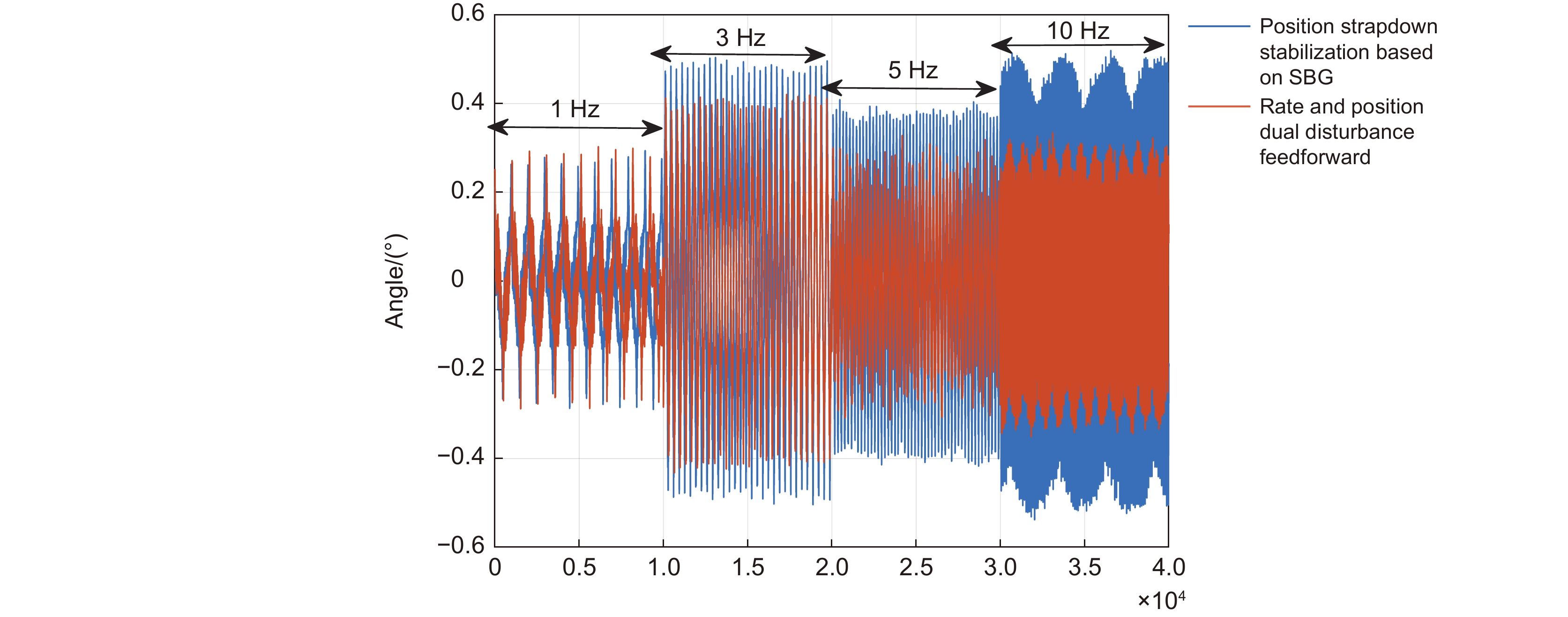
Figure 11.
System errors at different disturbance frequencies
-
Figure 12.
Disturbance suppression frequency response curves
- Figure .


