
 E-mail Alert
E-mail Alert RSS
RSS
| Citation: |
Zhao K, Fan W T, Hai H W, et al. Design of optical path stability measurement scheme and theoretical analysis of noise in telescope[J]. Opto-Electron Eng, 2023, 50(11): 230158. doi: 10.12086/oee.2023.230158

|
Design of optical path stability measurement scheme and theoretical analysis of noise in telescope
-
Abstract
Gravitational wave detection imposes high stability requirements on telescopes in space. To achieve independent measurement and calibration of the optical path stability accuracy of the telescope, the research was conducted on corresponding measurement methods. Based on the principle of heterodyne interferometric measurement, a high common-mode suppression interferometric measurement scheme was designed, and an optical path noise theoretical model was established. According to the requirement of 1 pm/Hz1/2@1 mHz for optical path stability indicators, the optical path noise level of the measurement system components was allocated. To verify the feasibility of the scheme and the accuracy of the noise theoretical model, an interferometric measurement system was constructed at the front end of the telescope. According to the relevant parameters of the experimental instruments and optical components, the theoretical evaluation of the system's optical path noise level was 7.319 nm/Hz1/2@10 mHz. The experimental measurement result of 3 nm/Hz1/2@10 mHz was consistent with the theoretical evaluation, indicating that the interferometric path has good noise common-mode suppression characteristics, and verifying the accuracy of the noise theoretical model. When the testing environment and instrument accuracy meet the requirements for optical path noise allocation, this measurement scheme is expected to achieve the measurement of the optical path stability of gravitational wave telescope. -

-
References
[1] Baker J, Bellovary J, Bender P L, et al. The laser interferometer space antenna: unveiling the millihertz gravitational wave sky[Z]. arXiv: 1907.06482, 2019. https://doi.org/10.48550/arXiv.1907.06482. [2] Luo J, Chen L S, Duan H Z, et al. TianQin: a space-borne gravitational wave detector[J]. Class Quantum Grav, 2016, 33(3): 035010. doi: 10.1088/0264-9381/33/3/035010 [3] 胡一鸣, 梅健伟, 罗俊. 天琴计划与国际合作[J]. 科学通报, 2019, 64(24): 2475−2483. doi: 10.1360/N972019-00046 Hu Y M, Mei J W, Luo J. TianQin project and international collaboration[J]. Chin Sci Bull, 2019, 64(24): 2475−2483. doi: 10.1360/N972019-00046 [4] 罗俊, 艾凌皓, 艾艳丽, 等. 天琴计划简介[J]. 中山大学学报(自然科学版), 2021, 60(1-2): 1−19. doi: 10.13471/j.cnki.acta.snus.2020.12.23.2020B154 Luo J, Ai L H, Ai Y L, et al. A brief introduction to the TianQin project[J]. Acta Sci Nat Univ Sunyatseni, 2021, 60(1-2): 1−19. doi: 10.13471/j.cnki.acta.snus.2020.12.23.2020B154 [5] 罗子人, 白姗, 边星, 等. 空间激光干涉引力波探测[J]. 力学进展, 2013, 43(4): 415−447. doi: 10.6052/1000-0992-13-044 Luo Z R, Bai S, Bian X, et al. Gravitational wave detection by space laser interferometry[J]. Adv Mech, 2013, 43(4): 415−447. doi: 10.6052/1000-0992-13-044 [6] 罗子人, 张敏, 靳刚, 等. 中国空间引力波探测“太极计划”及“太极1号”在轨测试[J]. 深空探测学报, 2020, 7(1): 3−10. doi: 10.15982/j.issn.2095-7777.2020.20191230001 Luo Z R, Zhang M, Jin G, et al. Introduction of Chinese space-borne gravitational wave detection program “Taiji” and “Taiji-1” satellite mission[J]. J Deep Space Explor, 2020, 7(1): 3−10. doi: 10.15982/j.issn.2095-7777.2020.20191230001 [7] 范纹彤, 赵宏超, 范磊, 等. 空间引力波探测望远镜系统技术初步分析[J]. 中山大学学报(自然科学版), 2021, 60(1-2): 178−185. doi: 10.13471/j.cnki.acta.snus.2020.11.02.2020b111 Fan W T, Zhao H C, Fan L, et al. Preliminary analysis of space gravitational wave detection telescope system technology[J]. Acta Sci Nat Univ Sunyatseni, 2021, 60(1-2): 178−185. doi: 10.13471/j.cnki.acta.snus.2020.11.02.2020b111 [8] Lucarelli S, Scheulen D, Kemper D, et al. The breadboard model of the LISA telescope assembly[J]. Proc SPIE, 2017, 10564: 105640J. doi: 10.1117/12.2309050 [9] Verlaan A L, Hogenhuis H, Pijnenburg J, et al. LISA telescope assembly optical stability characterization for ESA[J]. Proc SPIE, 2017, 10564: 105640K. doi: 10.1117/12.2309058 [10] Sanjuán J, Korytov D, Mueller G, et al. Note: silicon carbide telescope dimensional stability for space-based gravitational wave detectors[J]. Rev Sci Instrum, 2012, 83(11): 116107. doi: 10.1063/1.4767247 [11] Kulkarni S, Umińska A A, Sanjuán J, et al. Characterization of dimensional stability for materials used in ultra-stable structures[J]. Proc SPIE, 2021, 11820: 1182008. doi: 10.1117/12.2594661 [12] Umińska A A, Kulkarni S, Sanjuan J, et al. Ground testing of the LISA telescope[J]. Proc SPIE, 2021, 11820: 118200I. doi: 10.1117/12.2594605 [13] Kitamoto K, Kamiya T, Mizutani T. Evaluation of dimensional stability of metering truss structure using built-in laser interferometric dilatometer[J]. Eng Res Express, 2020, 2(4): 045023. doi: 10.1088/2631-8695/abc9cf [14] Jersey K, Zhang YQ, Harley-Trochimczyk I, et al. Design, fabrication, and testing of an optical truss interferometer for the LISA telescope[J]. Proc SPIE, 2021, 11820: 118200L. doi: 10.1117/12.2594738 [15] Sang B L, Deng X Q, Peng B, et al. Dimensional stability ground test and in-orbit prediction of SiC telescope frame for space gravitational wave detection[J]. IEEE Access, 2022, 10: 21041−21047. doi: 10.1109/ACCESS.2022.3152490 [16] Watchi J, Cooper S, Ding B L, et al. Contributed review: a review of compact interferometers[J]. Rev Sci Instrum, 2018, 89(12): 121501. doi: 10.1063/1.5052042 [17] Lieser M D. LISA optical bench development: experimental investigation of tilt-to-length coupling for a spaceborne gravitational wave detector[D]. Hannover: Leibniz University Hannover, 2017. [18] Dehne M. Construction and noise behaviour of ultra-stable optical systems for space interferometers[D]. Hannover: Leibniz University Hannover, 2012. -
Overview
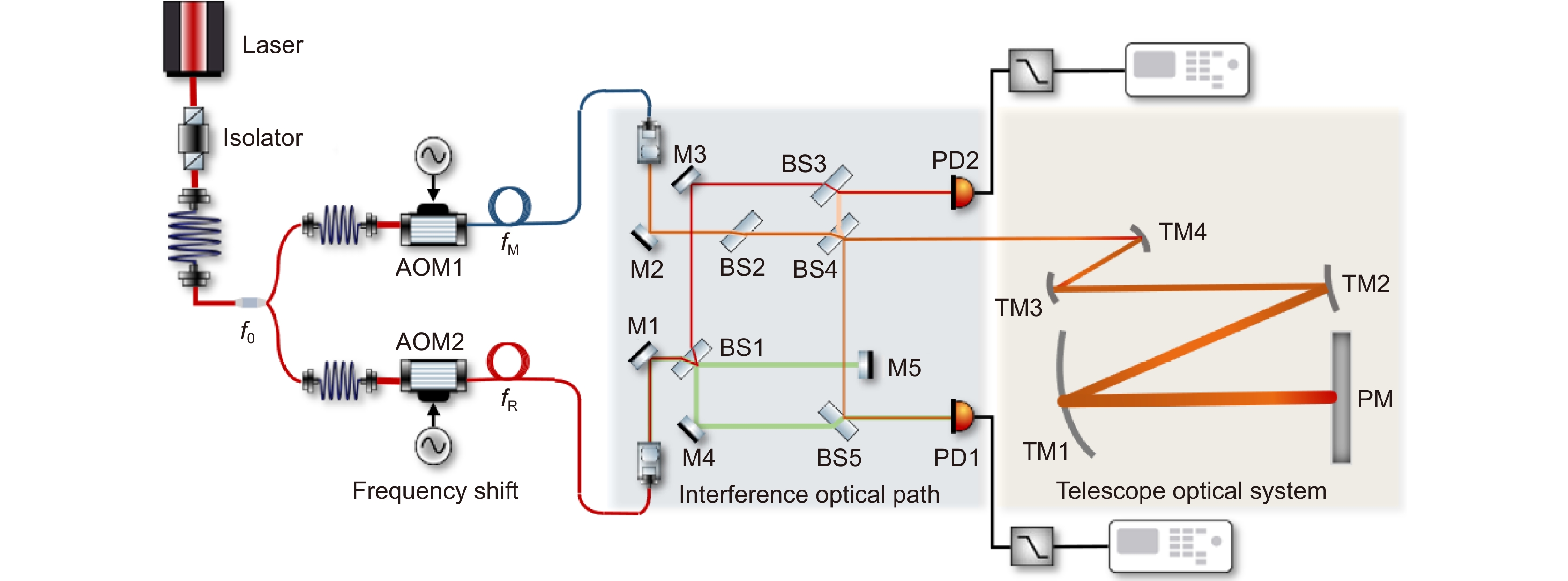
Gravitational wave detection imposes high stability requirements on telescopes in space. To achieve independent measurement and calibration of the optical path stability accuracy of the telescope, research was conducted on corresponding measurement methods. Based on the heterodyne interference measurement principle, a high common mode suppression interferometic measurement scheme was designed, using the phase difference information between the measuring interferometer and the reference interferometer to characterize the optical path changes of the measurement system. By conducting theoretical analysis on the optical path noise characteristics of each component module of the entire measurement system, a theoretical model of the optical path noise of the measurement system was established. The main sources of optical path noise are determined to be the front end optical path coupling noise, temperature optical path coupling noise, and standard plane mirror position misalignment noise. According to the requirement of 1 pm/Hz1/2@1 mHz for optical path stability indicators, the optical path noise level of the measurement system components was allocated. To verify the feasibility of the scheme and the accuracy of the noise theoretical model, an interferometric measurement system was constructed at the front end of the telescope. Firstly, based on the relevant parameters of the experimental instrument and optical components, the optical path noise level of the system was theoretically evaluated to be 7.319 nm/Hz1/2@10 mHz. Then, the optical path noise level measurement experiment was carried out on the constructed measurement system. The experimental results showed that the optical path noise background of the measurement system was less than 3 nm/Hz1/2@10 mHz. Finally, through the comparison and analysis of optical path noise theory and experimental results, it is known that the designed interference optical path in this paper has good noise common mode suppression characteristics, which further verifies the accuracy of the optical path noise theory model. When the testing environment and instrument accuracy meet the requirements of the optical path noise index allocation, this measurement scheme is expected to achieve the high-precision optical path stability measurement of the gravitational wave telescope.
-
Access History
Figures(15)
Tables(2)
Article Metrics

Export File
Citation
Zhao K, Fan W T, Hai H W, et al. Design of optical path stability measurement scheme and theoretical analysis of noise in telescope[J]. Opto-Electron Eng, 2023, 50(11): 230158. doi: 10.12086/oee.2023.230158
Format
Content
 DownLoad:
DownLoad:













-
Figure 1.
Schematic diagram of the optical path stability measurement scheme for the gravitational wave telescope
-
Figure 2.
Interferometer optical path structure schematic. (a) Measuring interferometer; (b) Reference interferometer
-
Figure 3.
Schematic diagram of the optical path stability measurement device for the telescope
-
Figure 4.
Curve of equivalent optical path noise level introduced by different fiber length differences under different temperature fluctuations
-
Figure 5.
Schematic diagram of changes in the optical path of the reflecting mirror and beam splitter caused by temperature fluctuations. (a) Reflecting mirror; (b) Beam splitter
-
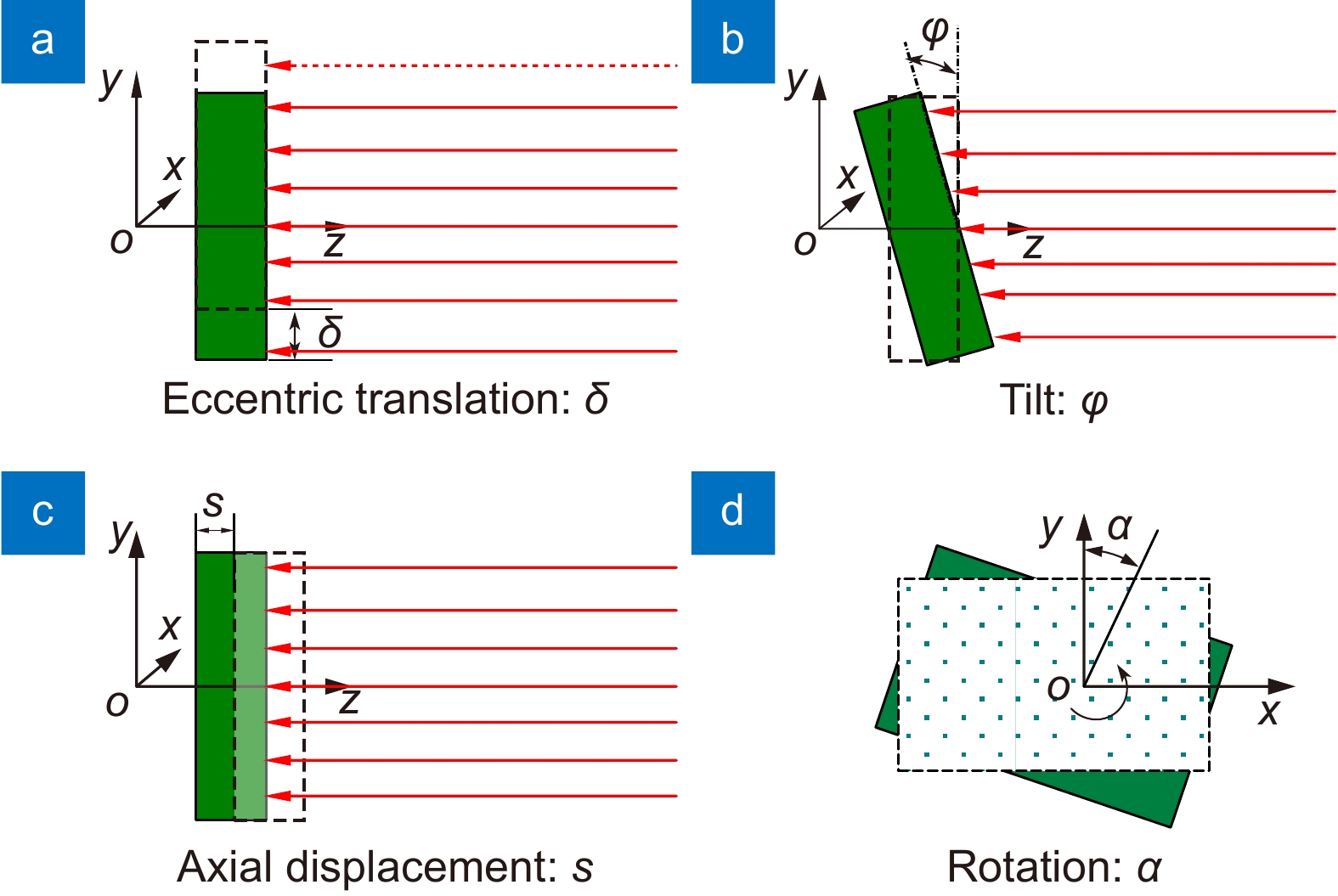
Figure 6.
Types of displacement of the standard plane mirror
-
Figure 7.
Schematic diagram of the off-axis four-mirror telescope optical system
-
Figure 8.
The optical path variation of the standard plane mirror system due to the inclination angle φ around the X-axis, Y-axis, and XY-axis. (a) Central beam; (b) Wave aberration
-
Figure 9.
Standard plane mirror compound tilt misalignment about the XY axis. (a) Curve of tilt-optical path coupling coefficient; (b) Curve of tilt-optical path noise
-
Figure 10.
Photograph of the integrated interferometric platform
-
Figure 11.
Interferometric measurement experimental setup
-
Figure 12.
Laser frequency noise background
-
Figure 13.
Noise curve of phase acquisition module. (a) Voltage background noise of the photodetector ineach gain mode; (b) Equivalent optical path noise of the phase meter
-
Figure 14.
Test curve of optical path noise level for the interferometric measurement system
- Figure .


