
 E-mail Alert
E-mail Alert RSS
RSS
| Citation: |
Xiao Z J, Wu Z W, Zhang J H, et al. Adaptive foreground focusing for target detection in UAV aerial images[J]. Opto-Electron Eng, 2024, 51(9): 240149. doi: 10.12086/oee.2024.240149

|
Adaptive foreground focusing for target detection in UAV aerial images
-
Abstract
To address the issues of missed and false detections caused by significant scale differences of foreground targets, uneven sample spatial distribution, and high background redundancy in UAV aerial images, an adaptive foreground-focused UAV aerial image target detection algorithm is proposed. A panoramic feature refinement classification layer is constructed to enhance the algorithm's focusing capability and improve the representation quality of foreground sample features through the re-parameterization spatial pixel variance method and shuffling operation. An adaptive dual-dimensional feature sampling unit is designed using a separate-learn-merge strategy to strengthen the algorithm's ability to extract foreground focus features and retain background detail information, thereby improving false detection situations and accelerating inference speed. A multi-path information integration module is constructed by combining a multi-branch structure and a broadcast self-attention mechanism to solve the ambiguity mapping problem caused by downsampling, optimize feature interaction and integration, enhance the algorithm's ability to recognize and locate multi-scale targets, and reduce model computational load. An adaptive foreground-focused detection head is introduced, which employs a dynamic focusing mechanism to enhance foreground target detection accuracy and suppress background interference. Experiments on the public datasets VisDrone2019 and VisDrone2021 show that the proposed method achieves mAP@0.5 values of 45.1% and 43.1%, respectively, improving by 6.6% and 5.7% compared to the baseline model, and outperforming other comparison algorithms. These results demonstrate that the proposed algorithm significantly improves detection accuracy and possesses good generalizability and real-time performance. -

-
References
[1] 陈旭, 彭冬亮, 谷雨. 基于改进YOLOv5s的无人机图像实时目标检测[J]. 光电工程, 2022, 49(3): 210372. doi: 10.12086/oee.2022.210372 Chen X, Peng D L, Gu Y. Real-time object detection for UAV images based on improved YOLOv5s[J]. Opto-Electron Eng, 2022, 49(3): 210372. doi: 10.12086/oee.2022.210372 [2] Xiong X R, He M T, Li T Y, et al. Adaptive feature fusion and improved attention mechanism-based small object detection for UAV target tracking[J]. IEEE Internet Things J, 2024, 11(12): 21239−21249. doi: 10.1109/JIOT.2024.3367415 [3] 马梁, 苟于涛, 雷涛, 等. 基于多尺度特征融合的遥感图像小目标检测[J]. 光电工程, 2022, 49(4): 210363. doi: 10.12086/oee.2022.210363 Ma L, Guo Y T, Lei T, et al. Small object detection based on multi-scale feature fusion using remote sensing images[J]. Opto-Electron Eng, 2022, 49(4): 210363. doi: 10.12086/oee.2022.210363 [4] Dalal N, Triggs B. Histograms of oriented gradients for human detection[C]//2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR'05), 2005: 886–893. https://doi.org/10.1109/CVPR.2005.177. [5] Ren S Q, He K M, Girshick R, et al. Faster R-CNN: towards real-time object detection with region proposal networks[J]. IEEE Trans Pattern Anal Mach Intell, 2017, 39(6): 1137−1149. doi: 10.1109/TPAMI.2016.2577031 [6] Redmon J, Divvala S, Girshick R, et al. You only look once: unified, real-time object detection[C]//Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition, 2016: 779–788. https://doi.org/10.1109/CVPR.2016.91. [7] Redmon J, Farhadi A. YOLO9000: better, faster, stronger[C]//2017 IEEE Conference on Computer Vision and Pattern Recognition, 2017: 6517–6525. https://doi.org/10.1109/CVPR.2017.690. [8] Redmon J, Farhadi A. YOLOv3: an incremental improvement[Z]. arXiv: 1804.02767, 2018. https://doi.org/10.48550/arXiv.1804.02767. [9] Bochkovskiy A, Wang C Y, Liao H Y M. YOLOv4: optimal speed and accuracy of object detection[Z]. arXiv: 2004.10934, 2020. https://doi.org/10.48550/arXiv.2004.10934. [10] Ge Z, Liu S T, Wang F, et al. YOLOX: exceeding YOLO series in 2021[Z]. arXiv: 2107.08430, 2021. https://doi.org/10.48550/arXiv.2107.08430. [11] Liu W, Anguelov D, Erhan D, et al. SSD: single shot MultiBox detector[C]//14th European Conference on Computer Vision, 2016: 21–37. https://doi.org/10.1007/978-3-319-46448-0_2. [12] Zhang Z, Yi H H, Zheng J. Focusing on small objects detector in aerial images[J]. Acta Electron Sin, 2023, 51(4): 944−955. doi: 10.12263/DZXB.20220313 [13] Li S C, Yang X D, Lin X X, et al. Real-time vehicle detection from UAV aerial images based on improved YOLOv5[J]. Sensors, 2023, 23(12): 5634. doi: 10.3390/s23125634 [14] Li K, Wang Y N, Hu Z M. Improved YOLOv7 for small object detection algorithm based on attention and dynamic convolution[J]. Appl Sci, 2023, 13(16): 9316. doi: 10.3390/app13169316 [15] Wang G, Chen Y F, An P, et al. UAV-YOLOv8: a small-object-detection model based on improved YOLOv8 for UAV aerial photography scenarios[J]. Sensors, 2023, 23(16): 7190. doi: 10.3390/s23167190 [16] Zhu M L, Kong E. Multi-scale fusion uncrewed aerial vehicle detection based on RT-DETR[J]. Electronics, 2024, 13(8): 1489. doi: 10.3390/electronics13081489 [17] Shao Y F, Yang Z X, Li Z H, et al. Aero-YOLO: an efficient vehicle and pedestrian detection algorithm based on unmanned aerial imagery[J]. Electronics, 2024, 13(7): 1190. doi: 10.3390/electronics13071190 [18] Zhan W, Sun C F, Wang M C, et al. An improved Yolov5 real-time detection method for small objects captured by UAV[J]. Soft Comput, 2022, 26(1): 361−373. doi: 10.1007/s00500-021-06407-8 [19] 陈朋磊, 王江涛, 张志伟, 等. 基于特征聚合与多元协同特征交互的航拍图像小目标检测[J]. 电子测量与仪器学报, 2023, 37(10): 183−192. doi: 10.13382/j.jemi.B2306431 Chen P L, Wang J T, Zhang Z W, et al. Small object detection in aerial images based on feature aggregation and multiple cooperative features interaction[J]. J Electron Meas Instrum, 2023, 37(10): 183−192. doi: 10.13382/j.jemi.B2306431 [20] Sui J C, Chen D K, Zheng X, et al. A new algorithm for small target detection from the perspective of unmanned aerial vehicles[J]. IEEE Access, 2024, 12: 29690−29697. doi: 10.1109/ACCESS.2024.3365584 [21] Li X, Wang W H, Hu X L, et al. Selective kernel networks[C]//Proceedings of 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2019: 510–519. https://doi.org/10.1109/CVPR.2019.00060. [22] Zhao X B, Liu K Q, Gao K, et al. Hyperspectral time-series target detection based on spectral perception and spatial-temporal tensor decomposition[J]. IEEE Trans Geosci Remote Sens, 2023, 61: 5520812. doi: 10.1109/TGRS.2023.3307071 [23] Wu Y X, He K M. Group normalization[C]//Proceedings of the 15th European Conference on Computer Vision, 2018: 3–19. https://doi.org/10.1007/978-3-030-01261-8_1. [24] Yin X Y, Goudriaan J A N, Lantinga E A, et al. A flexible sigmoid function of determinate growth[J]. Ann Bot, 2003, 91(3): 361−371. doi: 10.1093/aob/mcg029 [25] Tanaka M. Weighted sigmoid gate unit for an activation function of deep neural network[J]. Pattern Recognit Lett, 2020, 135: 354−359. doi: 10.1016/j.patrec.2020.05.017 [26] Guo Y H, Li Y D, Wang L Q, et al. Depthwise convolution is all you need for learning multiple visual domains[C]//Proceedings of the 33rd AAAI Conference on Artificial Intelligence, 2019: 8368–8375. https://doi.org/10.1609/aaai.v33i01.33018368. [27] Howard A G, Zhu M L, Chen B, et al. MobileNets: efficient convolutional neural networks for mobile vision applications[Z]. arXiv: 1704.04861, 2017. https://doi.org/10.48550/arXiv.1704.04861. [28] Zhang P F, Lo E, Lu B T. High performance depthwise and pointwise convolutions on mobile devices[C]//Proceedings of the 34th AAAI Conference on Artificial Intelligence, 2020: 6795–6802. https://doi.org/10.1609/aaai.v34i04.6159. [29] Lin M, Chen Q, Yan S C. Network in network[C]//2nd International Conference on Learning Representations, 2013. [30] Yan S, Shao H D, Wang J, et al. LiConvFormer: a lightweight fault diagnosis framework using separable multiscale convolution and broadcast self-attention[J]. Expert Syst Appl, 2024, 237: 121338. doi: 10.1016/j.eswa.2023.121338 [31] Vaswani A, Shazeer N, Parmar N, et al. Attention is all you need[C]//Proceedings of the 31st International Conference on Neural Information Processing Systems, 2017: 6000–6010. [32] Dosovitskiy A, Beyer L, Kolesnikov A, et al. An image is worth 16x16 words: transformers for image recognition at scale[C]//9th International Conference on Learning Representations, 2021. [33] Wu H, Wen C L, Shi S S, et al. Virtual sparse convolution for multimodal 3D object detection[C]//Proceedings of 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023: 21653–21662. https://doi.org/10.1109/CVPR52729.2023.02074. [34] Feng M K, Yu H C, Dang X Y, et al. Category-aware dynamic label assignment with high-quality oriented proposal[Z]. arXiv: 2407.03205, 2024. https://doi.org/10.48550/arXiv.2407.03205. [35] Verelst T, Tuytelaars T. Dynamic convolutions: exploiting spatial sparsity for faster inference[C]//Proceedings of 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020: 2317–2326. https://doi.org/10.1109/CVPR42600.2020.00239. [36] Du D W, Zhu P F, Wen L Y, et al. VisDrone-DET2019: the vision meets drone object detection in image challenge results[C]//Proceedings of 2019 IEEE/CVF International Conference on Computer Vision Workshops, 2019: 213–226. https://doi.org/10.1109/ICCVW.2019.00030. [37] Cao Y R, He Z J, Wang L J, et al. VisDrone-DET2021: the vision meets drone object detection challenge results[C]//Proceedings of 2021 IEEE/CVF International Conference on Computer Vision, 2021: 2847–2854. https://doi.org/10.1109/ICCVW54120.2021.00319. [38] Wang Y Y, Wang C, Zhang H, et al. Automatic ship detection based on RetinaNet using multi-resolution Gaofen-3 imagery[J]. Remote Sens, 2019, 11(5): 531. doi: 10.3390/rs11050531 [39] Zhu X K, Lyu S C, Wang X, et al. TPH-YOLOv5: Improved YOLOv5 based on transformer prediction head for object detection on drone-captured scenarios[C]//Proceedings of 2021 IEEE/CVF International Conference on Computer Vision, 2021: 2778–2788. https://doi.org/10.1109/ICCVW54120.2021.00312. [40] Liu C, Hong Z Y, Yu W H, et al. An efficient helmet wearing detection method based on YOLOv7-tiny[C]//Proceedings of the 6th International Conference on Machine Learning and Machine Intelligence, 2023: 92–99. https://doi.org/10.1145/3635638.3635652. [41] Zhu X Z, Su W J, Lu L W, et al. Deformable DETR: deformable transformers for end-to-end object detection[C]//9th International Conference on Learning Representations, 2021. [42] Wang A, Chen H, Liu L H, et al. YOLOv10: real-time end-to-end object detection[Z]. arXiv: 2405.14458, 2024. https://doi.org/10.48550/arXiv.2405.14458. [43] Li S X, Liu C, Tang K W, et al. Improved YOLOv5s algorithm for small target detection in UAV aerial photography[J]. IEEE Access, 2024, 12: 9784−9791. doi: 10.1109/ACCESS.2024.3353308 -
Overview
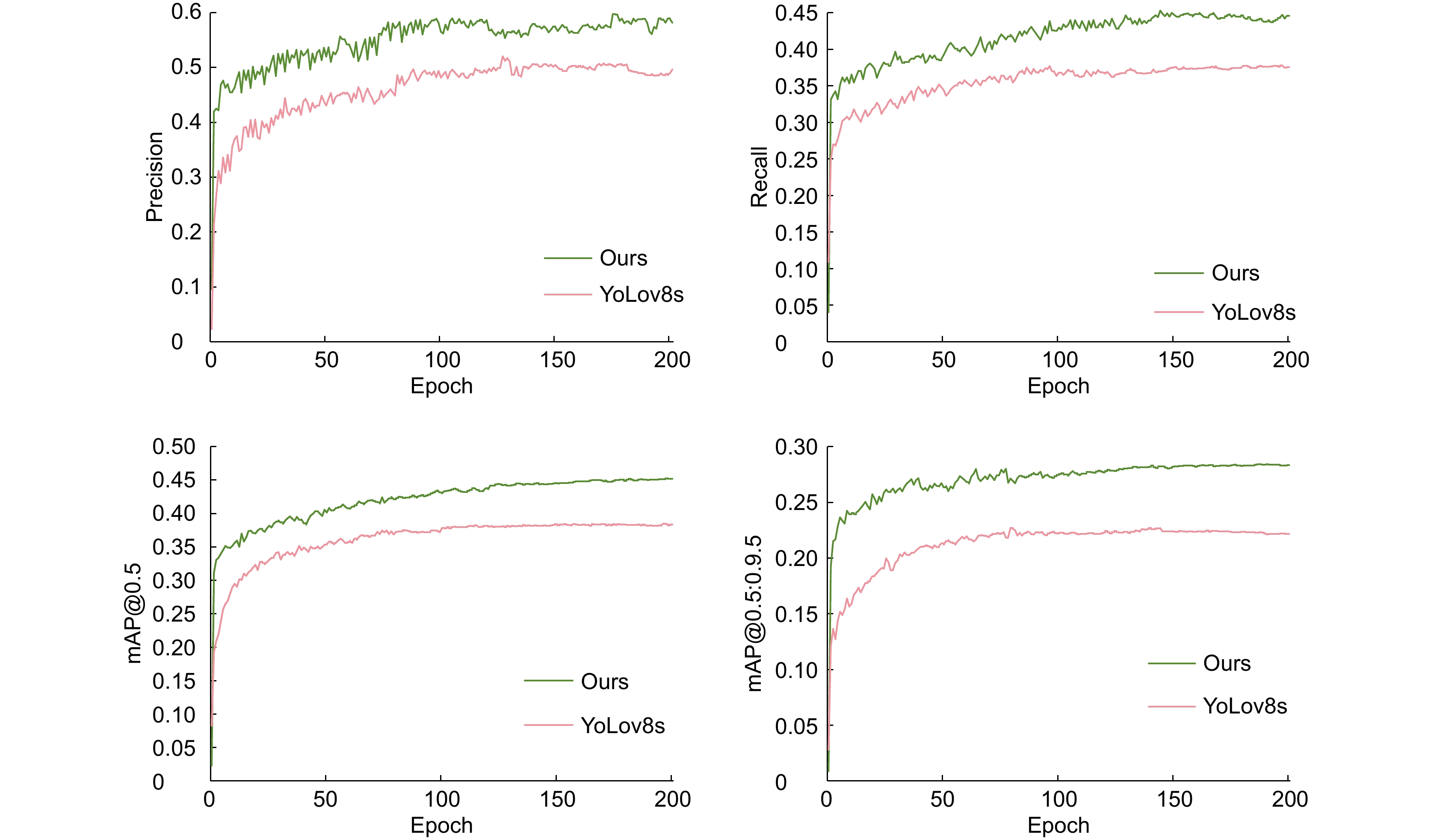
To address the issues of missed and false detections due to significant scale variations of foreground targets, uneven sample distribution, and high background redundancy in UAV aerial images, we propose an adaptive foreground-focused object detection algorithm based on the YOLOv8s model. This algorithm incorporates several novel components designed to enhance detection accuracy and efficiency. First, a panoramic feature refinement classification (PFRC) layer is introduced. This layer enhances the algorithm's focus capability and improves the representation quality of foreground samples through re-parameterized spatial pixel variance and shuffle operations. The PFRC layer effectively refines the spatial pixel distribution, highlighting important features while reducing noise. This ensures that the foreground representation is prominent and clear, thereby improving the algorithm's ability to detect objects accurately. Second, we incorporate an adaptive two-dimensional feature sampling (ATFS) unit. This unit employs a separate-learn-merge strategy, which strengthens the extraction of foreground features and retains essential background details. By dynamically adjusting the sampling grid to various scales and orientations, the ATFS unit enhances fine-grained detail extraction. This not only reduces false detections but also accelerates inference, making the algorithm more efficient. Third, a multi-path full-text information integration (MPFT) module is introduced. This module utilizes a multi-branch structure and a broadcast self-attention (BSA) mechanism to address the ambiguity mapping issues caused by downsampling. The MPFT module optimizes feature interaction and integration, enhancing the algorithm's ability to recognize and locate targets accurately. By processing different feature types simultaneously, the multi-branch structure and BSA mechanism reduce the computational load while maintaining high detection accuracy. Finally, we propose an adaptive foreground focus detection head (AFF_Detect). This detection head employs a dynamic focusing mechanism that adjusts based on input characteristics. The AFF_Detect head improves the detection accuracy of foreground targets and suppresses background interference. This dynamic adjustment ensures that the algorithm performs well across various scenarios, enhancing its robustness and generalization capabilities. Experimental results on the VisDrone2019 and VisDrone2021 datasets demonstrate the effectiveness of our proposed algorithm. The mAP@0.5 values achieved are 45.1% and 43.1%, respectively, representing improvements of 6.6% and 5.7% over the baseline model. These results indicate that our algorithm outperforms other state-of-the-art methods, showcasing significant enhancements in detection accuracy, robustness, generalization, and real-time performance. In conclusion, our adaptive foreground-focused object detection algorithm introduces innovative components that address the challenges of UAV aerial image analysis. The integration of the PFRC layer, ATFS unit, MPFT module, and AFF_Detect head results in a comprehensive solution that enhances the representation of foreground features, reduces false detections, and optimizes computational efficiency. These advancements make our algorithm a valuable contribution to UAV-based object detection, offering a significant improvement in performance and reliability.
-
Access History

Figures(10)
Tables(4)
Article Metrics

Export File
Citation
Xiao Z J, Wu Z W, Zhang J H, et al. Adaptive foreground focusing for target detection in UAV aerial images[J]. Opto-Electron Eng, 2024, 51(9): 240149. doi: 10.12086/oee.2024.240149
Format
Content
 DownLoad:
DownLoad:


-
Figure 1.
Overall model structure
-
Figure 2.
Panoramic feature classification layer (PFRC) structure
-
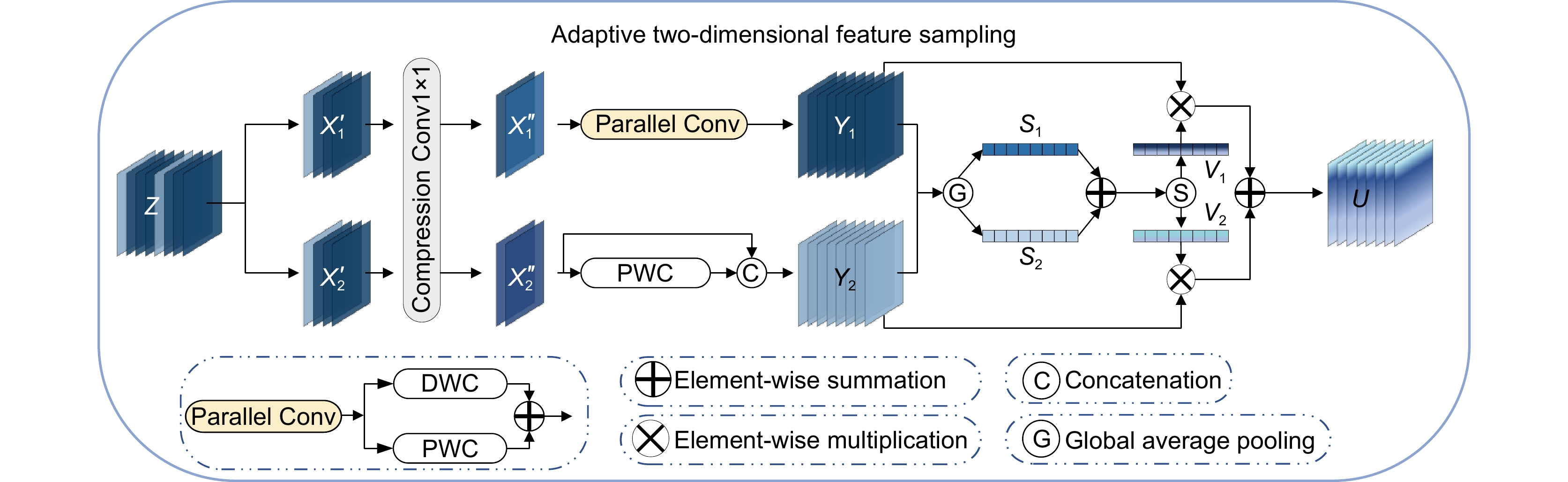
Figure 3.
Adaptive two-dimensional feature sampling (ATFS) structure
-
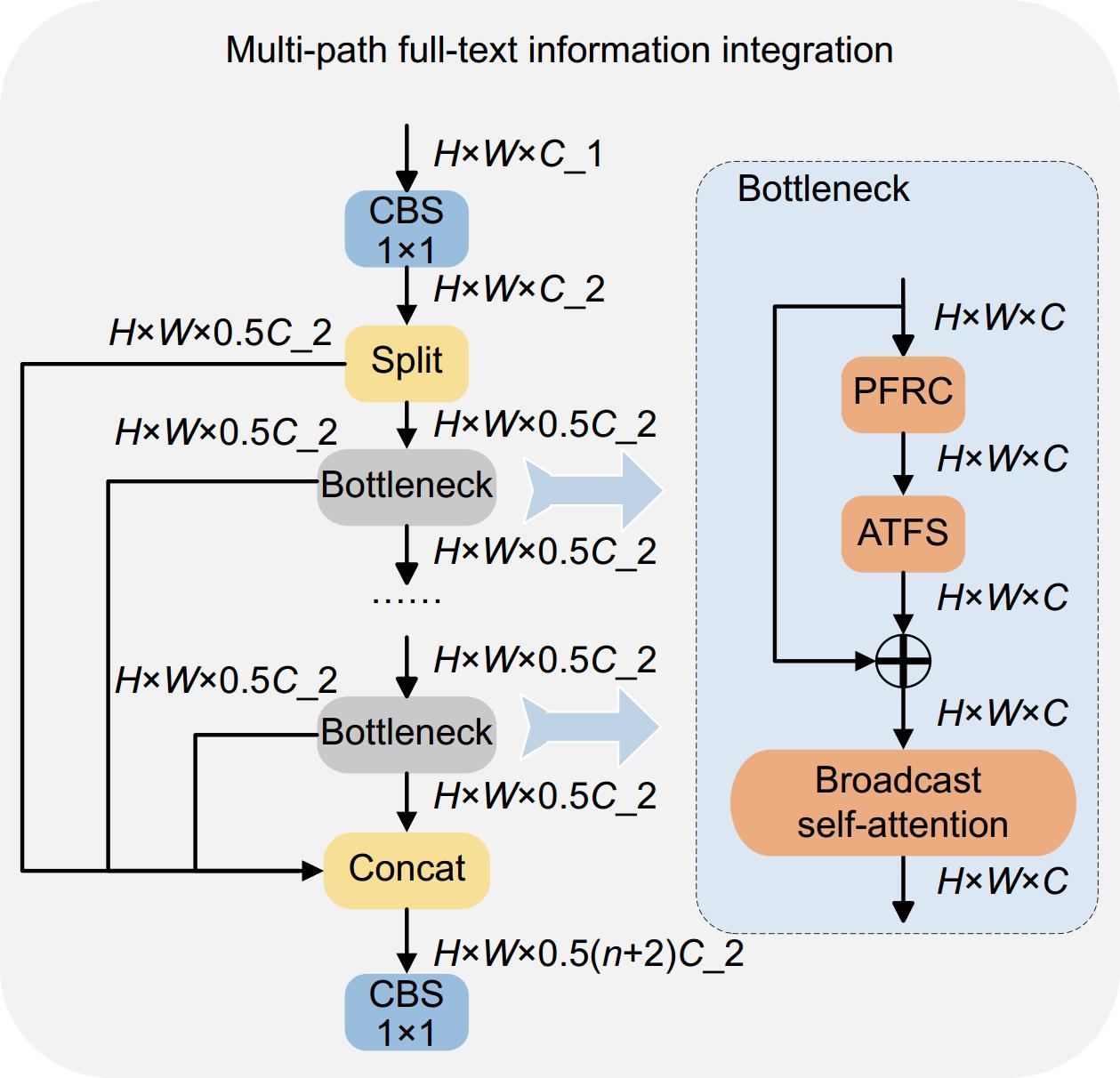
Figure 4.
Structure of multi-path full-text information integration (MPFT)
-
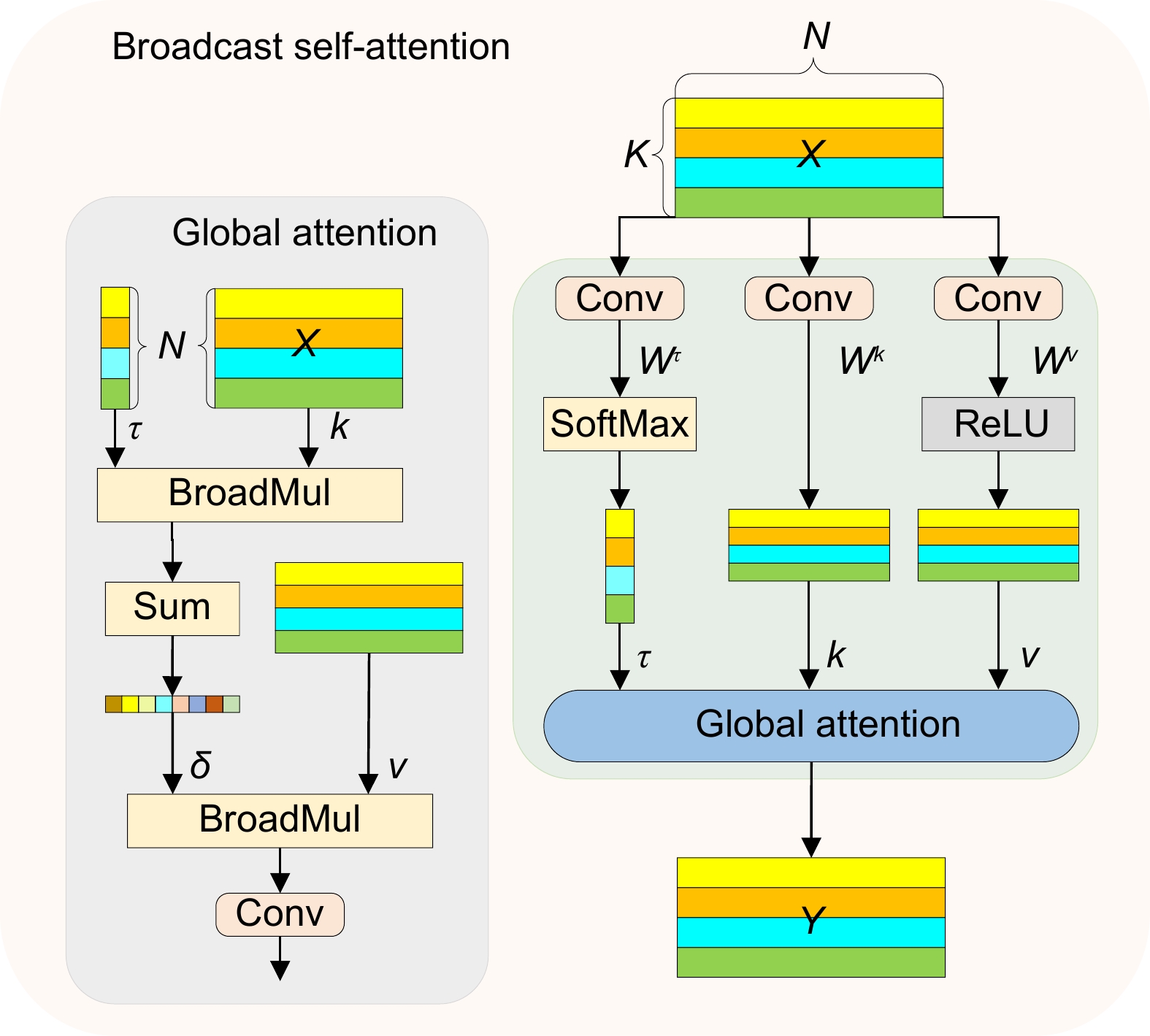
Figure 5.
Broadcast self-attention (BSA) mechanism structure
-
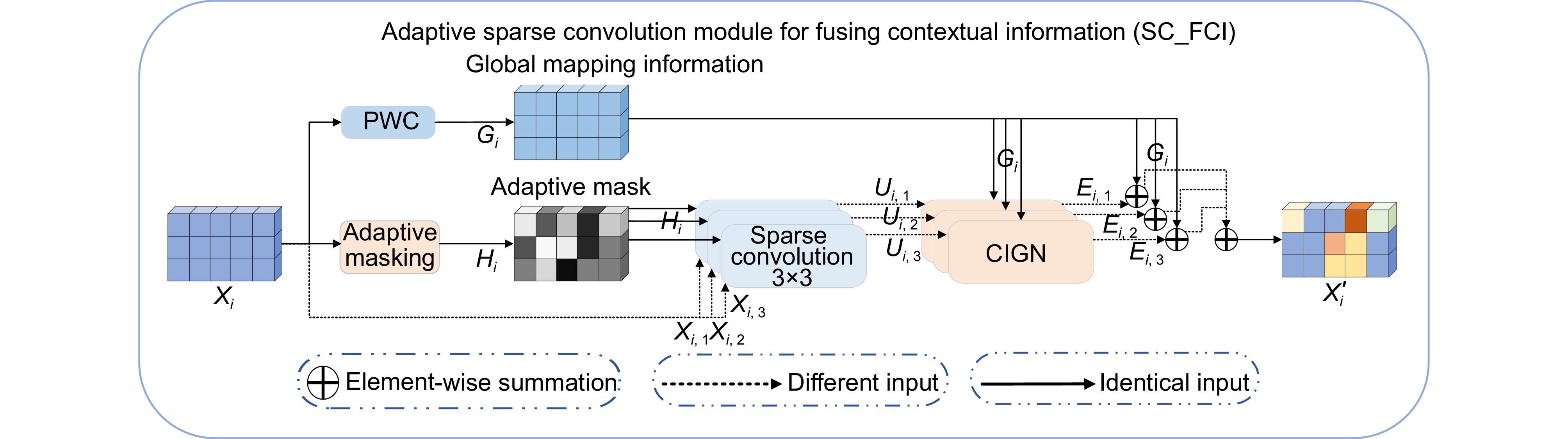
Figure 6.
SC_FCI structure
-
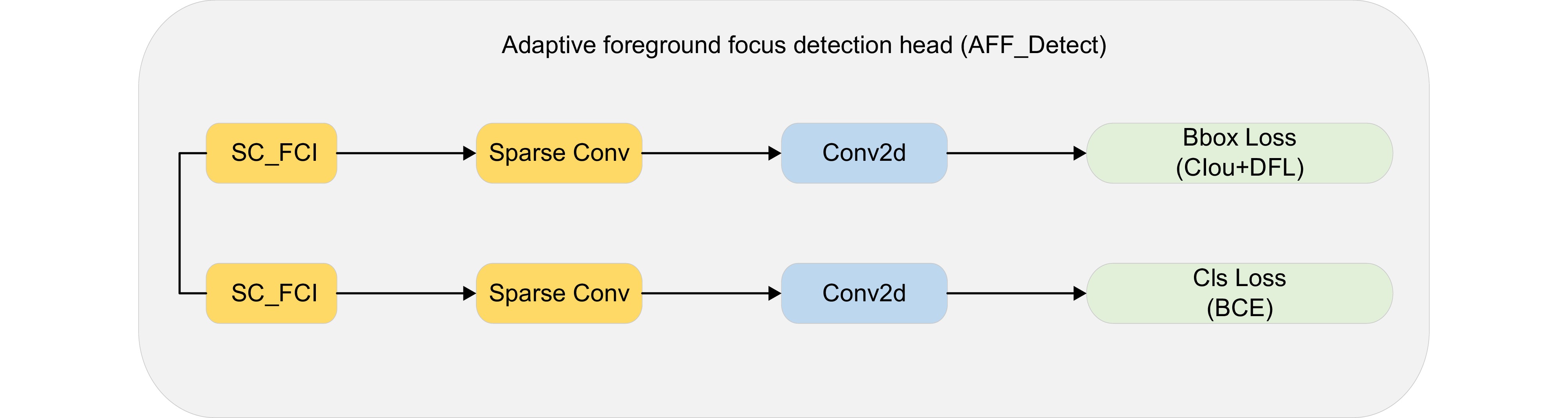
Figure 7.
Adaptive foreground focus detect head (AFF_Detect) structure
-
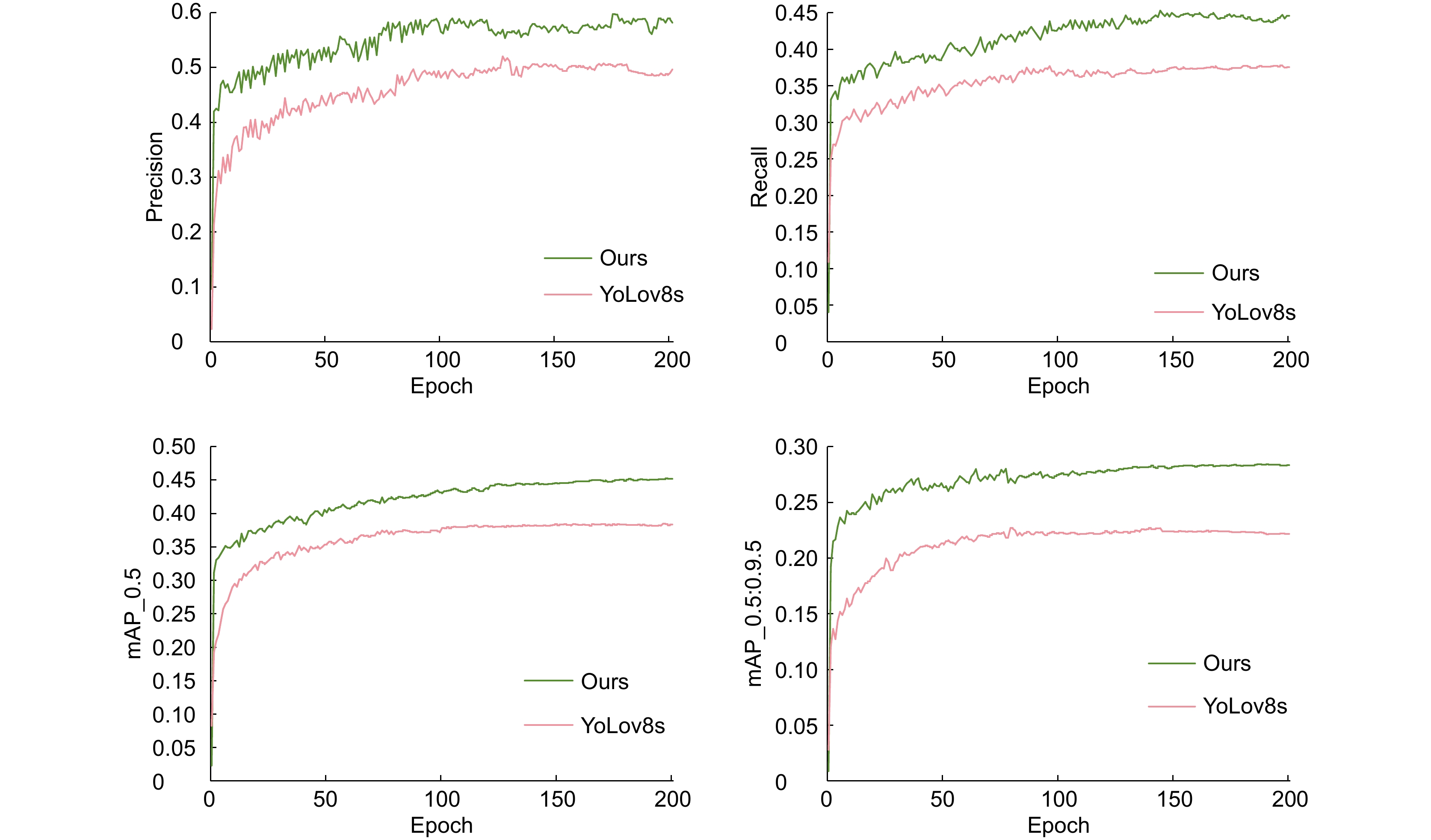
Figure 8.
Comparison of evaluation indicators between the YOLOv8s and improved mode
-
Figure 9.
Comparison test visualisation results. (a) RetinaNet; (b) YOLOv5s;(c) Faster-RCNN; (d) TPH-YOLOv5; (e) YOLOv7-tiny; (f) YOLOv8s;(g) YOLOv10s; (h) Improved YOLOv5; (i) Deformmable-DETR; (j) Ours
- Figure .


