
 E-mail Alert
E-mail Alert RSS
RSS
| Citation: |
Luo Y, Liu K K, Yang F, et al. Observation and compensation control of sliding mode compound layered interference for the fast steering mirror system[J]. Opto-Electron Eng, 2023, 50(4): 220330. doi: 10.12086/oee.2023.220330

|
Observation and compensation control of sliding mode compound layered interference for the fast steering mirror system
-
Abstract
The voice coil motor-driven fast steering mirror is an important part of a high-precision photoelectric tracking system. In the photoelectric tracking system of the moving platform, the fast steering mirror system will suffer more complex and intense internal and external interference. The traditional passive interference suppression methods and the active interference suppression methods that treat the interference as lumped interference will not be enough to ensure the high-precision stability of boresight. Therefore, this paper proposes a sliding mode composite layered interference observation and compensation control strategy which combines harmonic interference observation and extended state observation. Firstly, the harmonic disturbance observer is used to observe the harmonic disturbance with a priori frequency information. Then the extended state observer is used to observe other unknown disturbances. Finally, based on the observed multi-source interference, the sliding mode nonlinear method with anti-interference ability is used to design a composite controller to maximize the suppression of multi-source disturbances suffered by the system. The experiment shows that the sliding mode composite layered interference observation compensation method proposed in this paper can significantly improve the LOS stability accuracy of the fast steering mirror compared with the traditional single interference observation compensation method. -

-
References
[1] 胡立发, 刘超, 申文, 等. 自适应光学技术在天文观测中的研究进展[J]. 中国科学:物理学 力学 天文学, 2017, 47(8): 084202. doi: 10.1360/SSPMA2016-00425 Hu L F, Liu C, Shen W, et al. Advancement of adaptive optics in astronomical observation[J]. Sci Sin Phys, Mech Astron, 2017, 47(8): 084202. doi: 10.1360/SSPMA2016-00425 [2] 贾文武, 刘培正, 唐自力, 等. 靶场适用的光电经纬仪光轴平行性检测[J]. 光学 精密工程, 2020, 28(8): 1670−1677. doi: 10.3788/OPE.20202808.1670 Jia W W, Liu P Z, Tang Z L, et al. Detection method for optical-axis parallelism of photoelectric theodolite in range[J]. Opt Precis Eng, 2020, 28(8): 1670−1677. doi: 10.3788/OPE.20202808.1670 [3] 李志俊, 毛耀, 亓波, 等. 量子光通信中位置修正单检测控制方法[J]. 光电工程, 2022, 49(3): 210311. doi: 10.12086/oee.2022.210311 Li Z J, Mao Y, Qi B, et al. Research on control technology of single detection based on position correction in quantum optical communication[J]. Opto-Electron Eng, 2022, 49(3): 210311. doi: 10.12086/oee.2022.210311 [4] 唐涛, 马佳光, 陈洪斌, 等. 光电跟踪系统中精密控制技术研究进展[J]. 光电工程, 2020, 47(10): 200315. doi: 10.12086/oee.2020.200315 Tang T, Ma J G, Chen H B, et al. A review on precision control methodologies for optical-electric tracking control system[J]. Opto-Electron Eng, 2020, 47(10): 200315. doi: 10.12086/oee.2020.200315 [5] 张良总, 杨涛, 吴云, 等. 基于图像测量的Stewart平台双阶控制技术[J]. 光电工程, 2022, 49(8): 220019. doi: 10.12086/oee.2022.220019 Zhang L Z, Yang T, Wu Y, et al. Image measurement-based two-stage control of Stewart platform[J]. Opto-Electron Eng, 2022, 49(8): 220019. doi: 10.12086/oee.2022.220019 [6] 刘力双, 夏润秋, 吕勇, 等. 音圈电机快速控制反射镜研究现状[J]. 激光杂志, 2020, 41(9): 1−7. doi: 10.14016/j.cnki.jgzz.2020.09.001 Liu L S, Xia R Q, Lv Y, et al. Research situation of fast steering mirror driven by voice coil motor[J]. Laser J, 2020, 41(9): 1−7. doi: 10.14016/j.cnki.jgzz.2020.09.001 [7] 赵磊, 纪明, 赵振海, 等. 舰载激光武器稳定平台粗精复合控制[J]. 激光与红外, 2019, 49(1): 86−92. doi: 10.3969/j.issn.1001-5078.2019.01.015 Zhao L, Ji M, Zhao Z H, et al. Primary-precise compounded control for stabilized platform in shipborne laser weapon[J]. Laser Infrared, 2019, 49(1): 86−92. doi: 10.3969/j.issn.1001-5078.2019.01.015 [8] 侯艳芳, 叶泽田, 杨勇. 基于POS数据的车载面阵CCD影像与激光点云融合处理研究[J]. 遥感信息, 2011(4): 76−79. doi: 10.3969/j.issn.1000-3177.2011.04.015 Hou Y F, Ye Z T, Yang Y. Research on integrated processing of vehicle-borne array CCD images and laser point cloud based on POS data[J]. Remote Sens Inf, 2011(4): 76−79. doi: 10.3969/j.issn.1000-3177.2011.04.015 [9] 朱广颂. 面向星载光通信应用的高精度瞄准技术研究[D]. 武汉: 华中科技大学, 2020. Zhu G S. Research on high precision pointing technology for spaceborne optical communication applications[D]. Wuhan: Huazhong University of Science & Technology, 2020. [10] 高卓, 江泽, 邓麟. 机载光电吊舱目标定位技术研究[J]. 导航定位学报, 2013, 1(4): 74−78. doi: 10.3969/j.issn.2095-4999.2013.04.017 Gao Z, Jiang Z, Deng L. Research on airborne optoelectronic pod target location method[J]. J Navig Positioning, 2013, 1(4): 74−78. doi: 10.3969/j.issn.2095-4999.2013.04.017 [11] 杜言鲁, 丁亚林, 许永森, 等. 机载光电平台隔振系统振动耦合分析[J]. 中国机械工程, 2015, 26(21): 2880−2884. doi: 10.3969/j.issn.1004-132X.2015.21.007 Du Y L, Ding Y L, Xu Y S, et al. Analysis of coupled vibration in isolation system for airborne optoelectronic pod[J]. China Mech Eng, 2015, 26(21): 2880−2884. doi: 10.3969/j.issn.1004-132X.2015.21.007 [12] Tian J, Yang W S, Peng Z M, et al. Inertial sensor-based multiloop control of fast steering mirror for line of sight stabilization[J]. Opt Eng, 2016, 55(11): 111602. doi: 10.1117/1.OE.55.11.111602 [13] Zhou X, Mao Y, Zhang C, et al. A comprehensive performance improvement control method by fractional order control[J]. IEEE Photonics J, 2018, 10(5): 7906811. doi: 10.1109/jphot.2018.2865032 [14] Ohishi K, Nakao M, Ohnishi K, et al. Microprocessor-controlled DC motor for load-insensitive position servo system[J]. IEEE Trans Ind Electron, 1987, IE-34(1): 44−49. doi: 10.1109/TIE.1987.350923 [15] Han J Q. From PID to active disturbance rejection control[J]. IEEE Trans Ind Electron, 2009, 56(3): 900−906. doi: 10.1109/TIE.2008.2011621 [16] Deng C, Yao M, Ren G, et al. MEMS inertial sensors-based multi-loop control enhanced by disturbance observation and compensation for fast steering mirror system[J]. Sensors, 2016, 16(11): 1920. doi: 10.3390/s16111920 [17] Luo Y, Huang Y M, Deng C, et al. Combining a disturbance observer with triple-loop control based on MEMS accelerometers for line-of-sight stabilization[J]. Sensors, 2017, 17(11): 2648. doi: 10.3390/s17112648 [18] Deng J Q, Zhou X, Mao Y. On vibration rejection of nonminimum-phase long-distance laser pointing system with compensatory disturbance observer[J]. Mechatronics, 2021, 74: 102490. doi: 10.1016/j.mechatronics.2021.102490 [19] Nie K, Ren W, Zhou X, et al. Virtual dual-loop feedback control with model-construction linear extended state observer for free space optical communication[J]. Sensors, 2019, 19(18): 3846. doi: 10.3390/s19183846 [20] Sui S S, Zhao T. Active disturbance rejection control for optoelectronic stabilized platform based on adaptive fuzzy sliding mode control[J]. ISA Trans, 2022, 125: 85−98. doi: 10.1016/j.isatra.2021.06.020 [21] Qiao Q, Nie K, Deng J Q, et al. Sliding mode control of the optoelectronic stabilized platform based on the exponential approach law[C]//Proceedings of the 34th Youth Academic Annual Conference of Chinese Association of Automation, Jinzhou, 2019: 407–410. https://doi.org/10.1109/YAC.2019.8787674. [22] 侯林林, 宗广灯. 具有多干扰的非线性时变时滞关联系统的复合分层抗干扰控制[J]. 系统科学与数学, 2014, 34(12): 1595−1603. doi: 10.12341/jssms12494 Hou L L, Zong G D. Composite hierarchical anti-disturbance control for nonlinear time-varying delay interconnected systems with multiple disturbances[J]. J Syst Sci Math Sci, 2014, 34(12): 1595−1603. doi: 10.12341/jssms12494 [23] Gao Z Q. Scaling and bandwidth-parameterization based controller tuning[C]//Proceedings of the 2003 American Control Conference, Denver, 2003: 4989–4996. https://doi.org/10.1109/ACC.2003.1242516. -
Overview
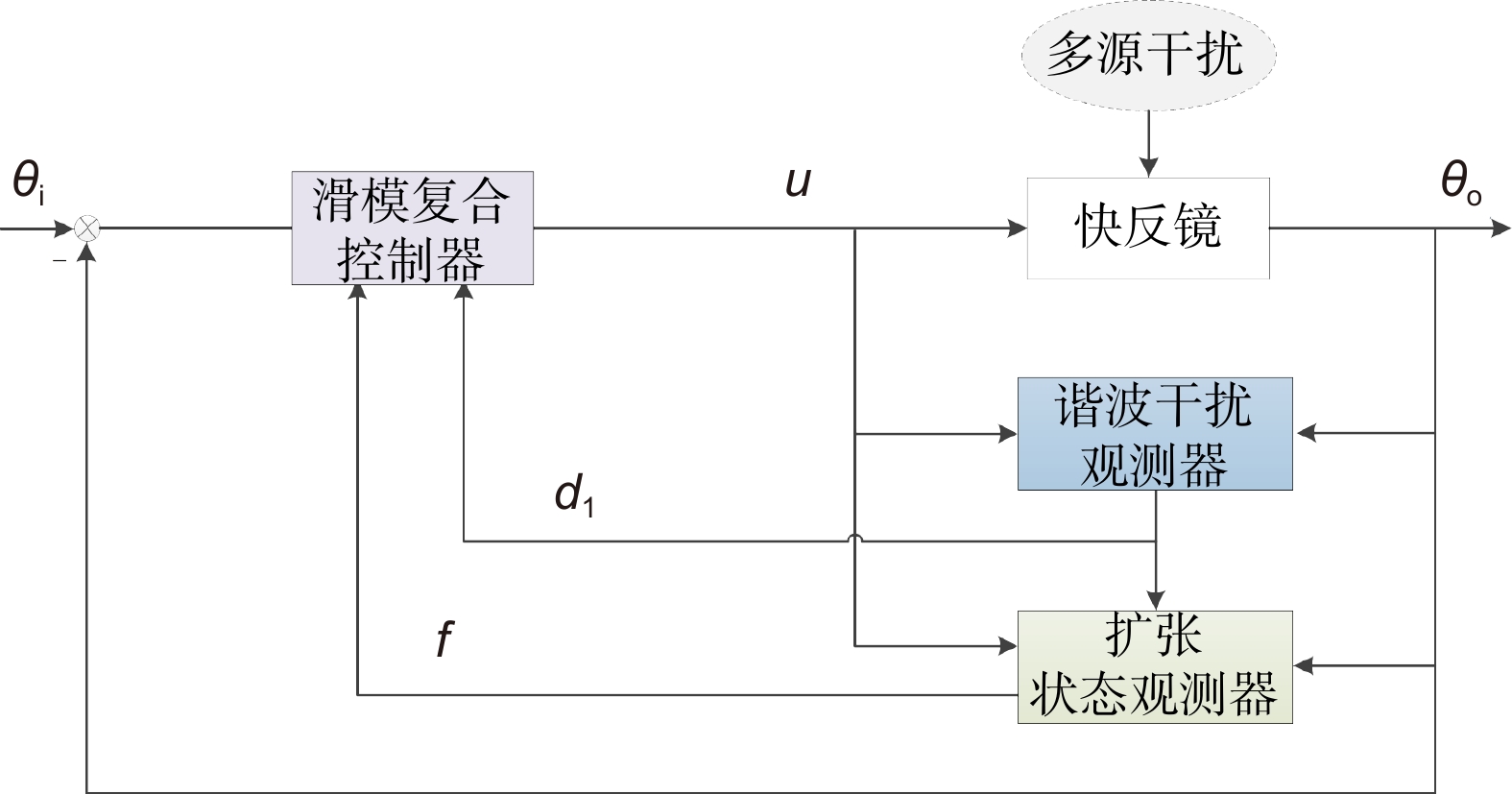
The fast steering mirror is an important component of a high-precision photoelectric tracking system. Fast steering mirrors are generally driven by voice coil motors with high linearity, high sensitivity, and high bandwidth to ensure adequate tracking and anti-interference accuracy of the whole system. In recent years, with the expansion of applications, the photoelectric tracking system has expanded from a fixed platform mounted on a foundation to a moving platform. However, the environment in which the motion platform is located is more severe and the internal and external interference caused by the carrier attitude change will be more complex and intense, leading to a serious decrease in the accuracy of the visual axis stabilization, and even make the tracking target out of the field of view and lose the target. In general, for the photoelectric tracking system in a moving platform, the traditional passive interference suppression methods and the active interference suppression methods that treat the interference as lumped interference will not be enough to ensure the high-precision stability of boresight. Therefore, this paper proposes a sliding mode composite layered interference observation and compensation control strategy which combines harmonic interference observation and extended state observation. Firstly, the harmonic disturbance observer is used to observe the harmonic disturbance with a priori frequency information. Then, the extended state observer is used to observe other unknown disturbances. Finally, based on the observed multi-source interference, the sliding mode nonlinear method with anti-interference ability is used to design a composite controller to maximize the suppression of multi-source disturbances suffered by the system. The experiment shows that the sliding mode composite layered interference observation compensation method proposed in this paper can estimate multi-source interference more accurately, has stronger interference suppression ability, and obtains higher boresight stabilization accuracy for the fast steering mirror compared with the traditional single interference observation compensation method.
-
Access History

Figures(7)
Tables(2)
Article Metrics


Export File
Citation
Luo Y, Liu K K, Yang F, et al. Observation and compensation control of sliding mode compound layered interference for the fast steering mirror system[J]. Opto-Electron Eng, 2023, 50(4): 220330. doi: 10.12086/oee.2023.220330
Format
Content
 DownLoad:
DownLoad:

-
Figure 1.
Composition of the fast steering mirror system
-
Figure 2.
Composite layered disturbance observer control
-
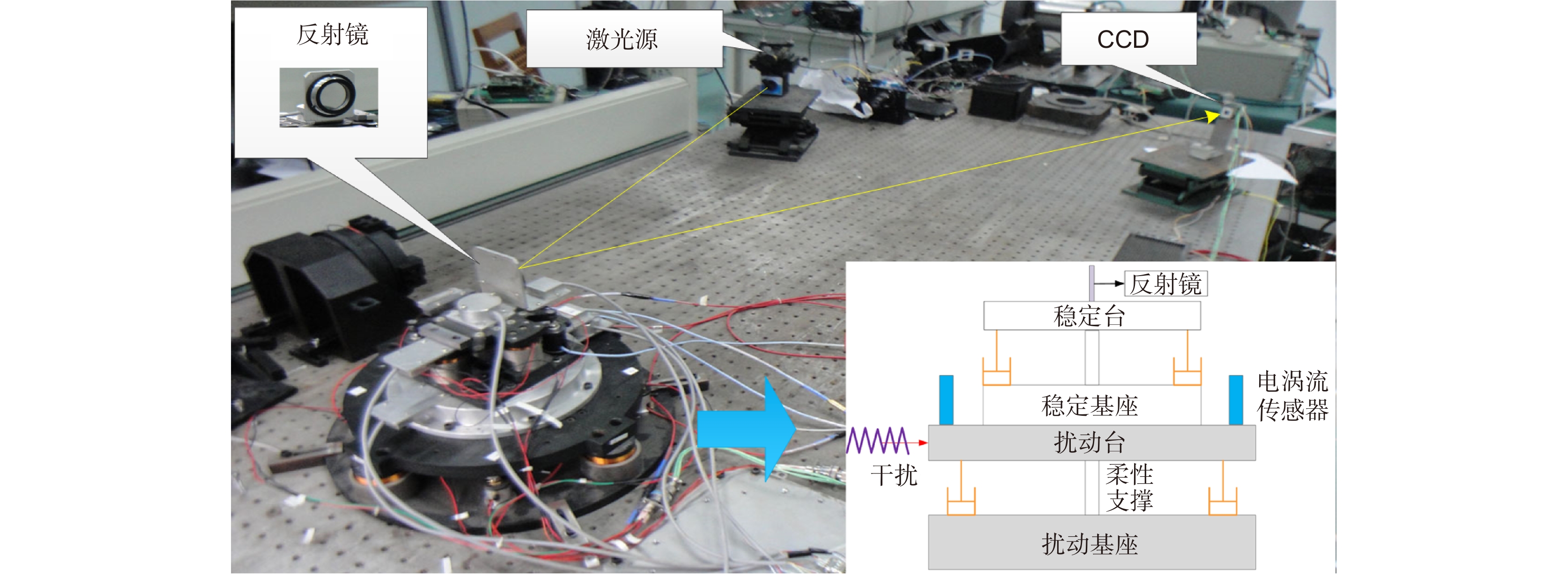
Figure 3.
Experimental devices
-
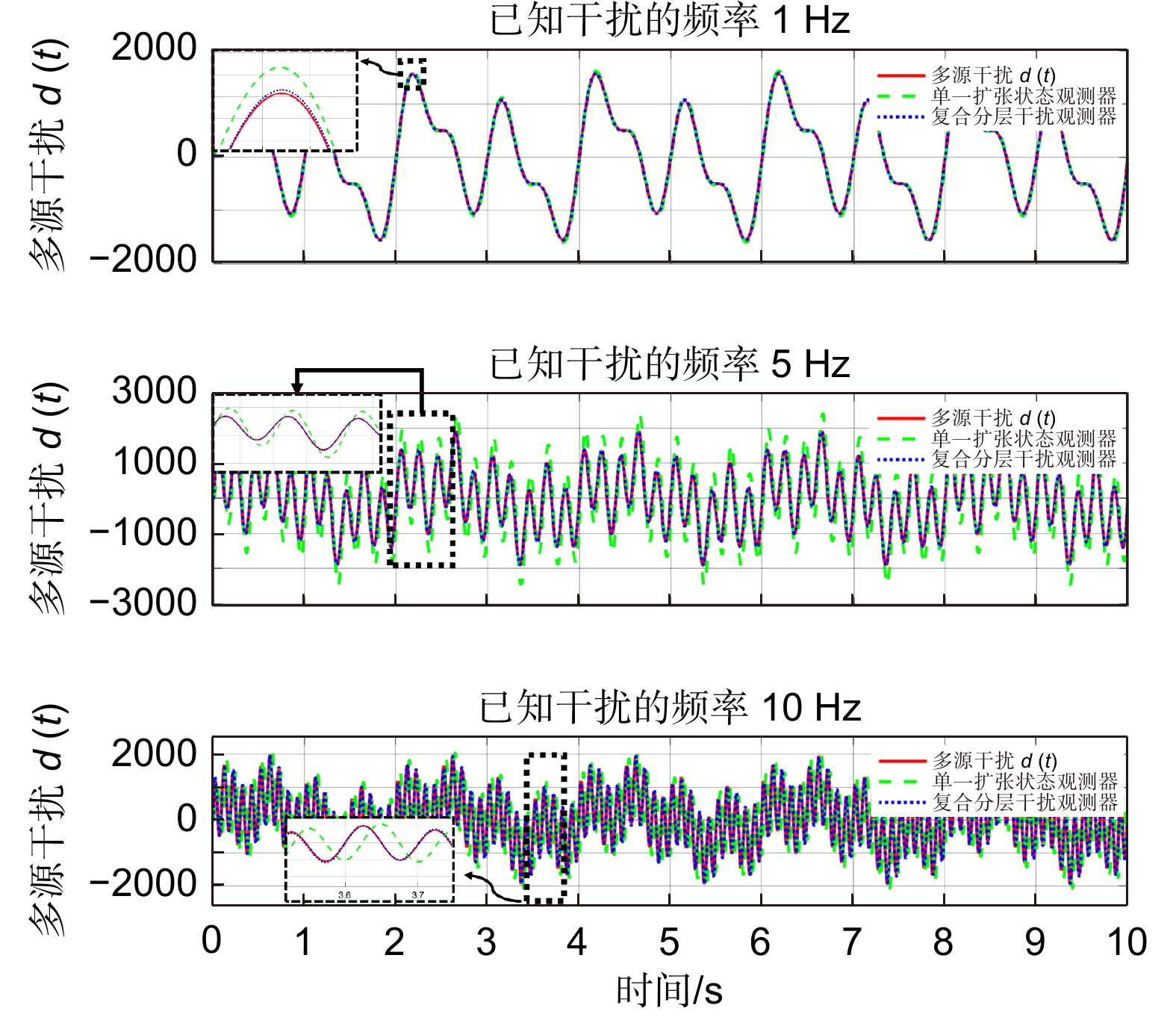
Figure 4.
Multi-source interference d(t) observation
-
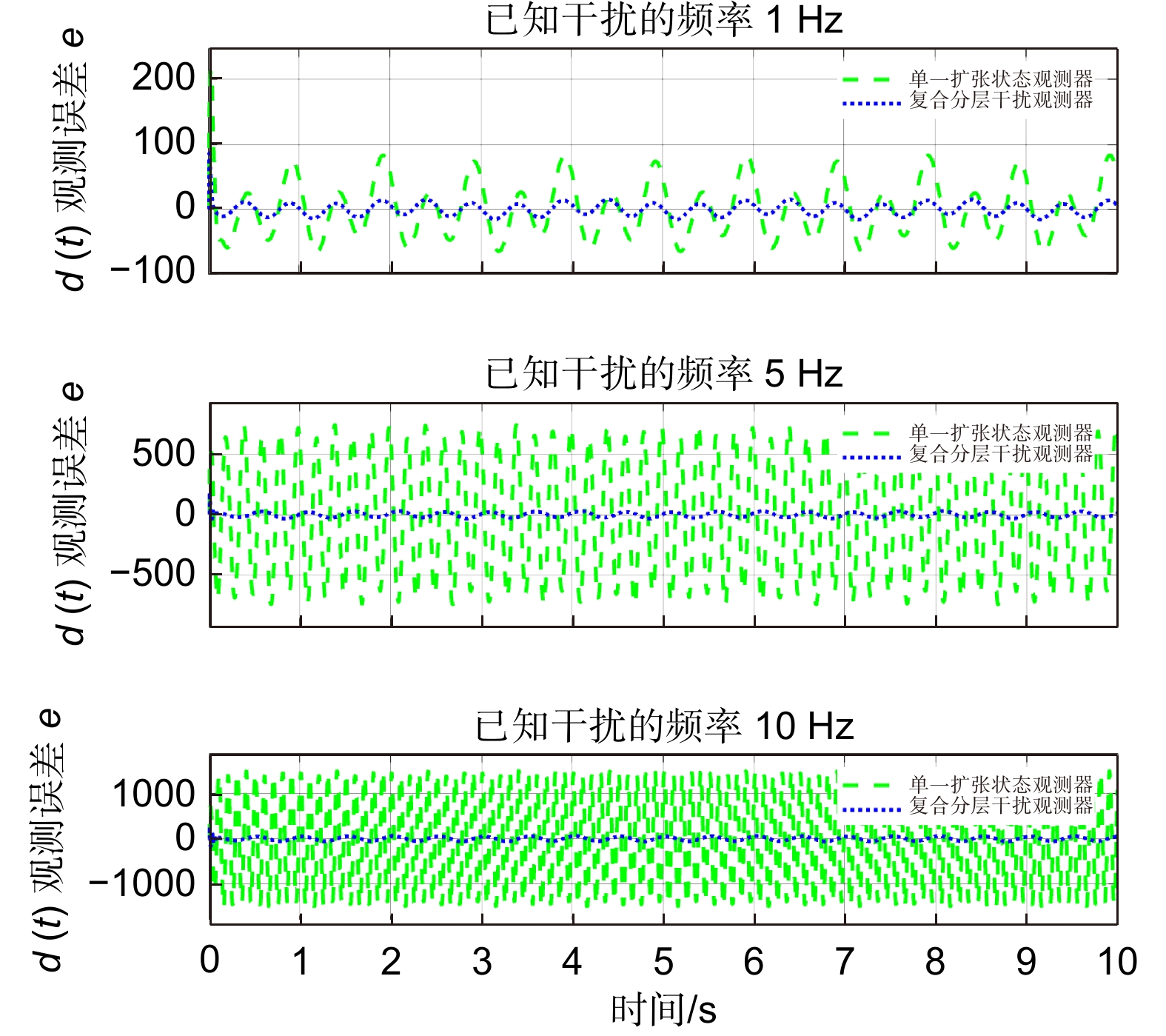
Figure 5.
Multi-source perturbation d(t) observation error comparison
-
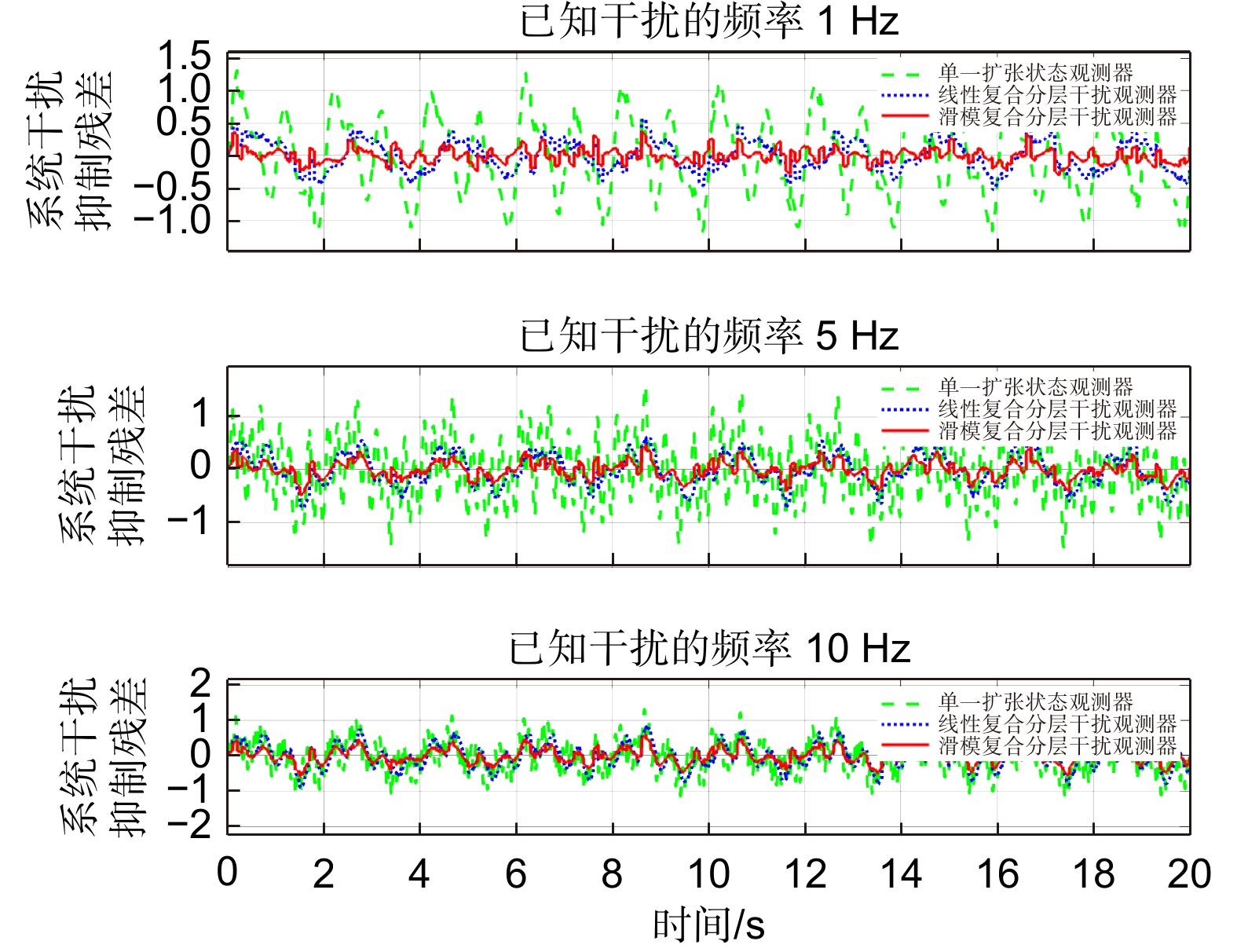
Figure 6.
Comparison of system interference suppression residuals under different control strategies
- Figure .


